Policy Gradient
Algorithm
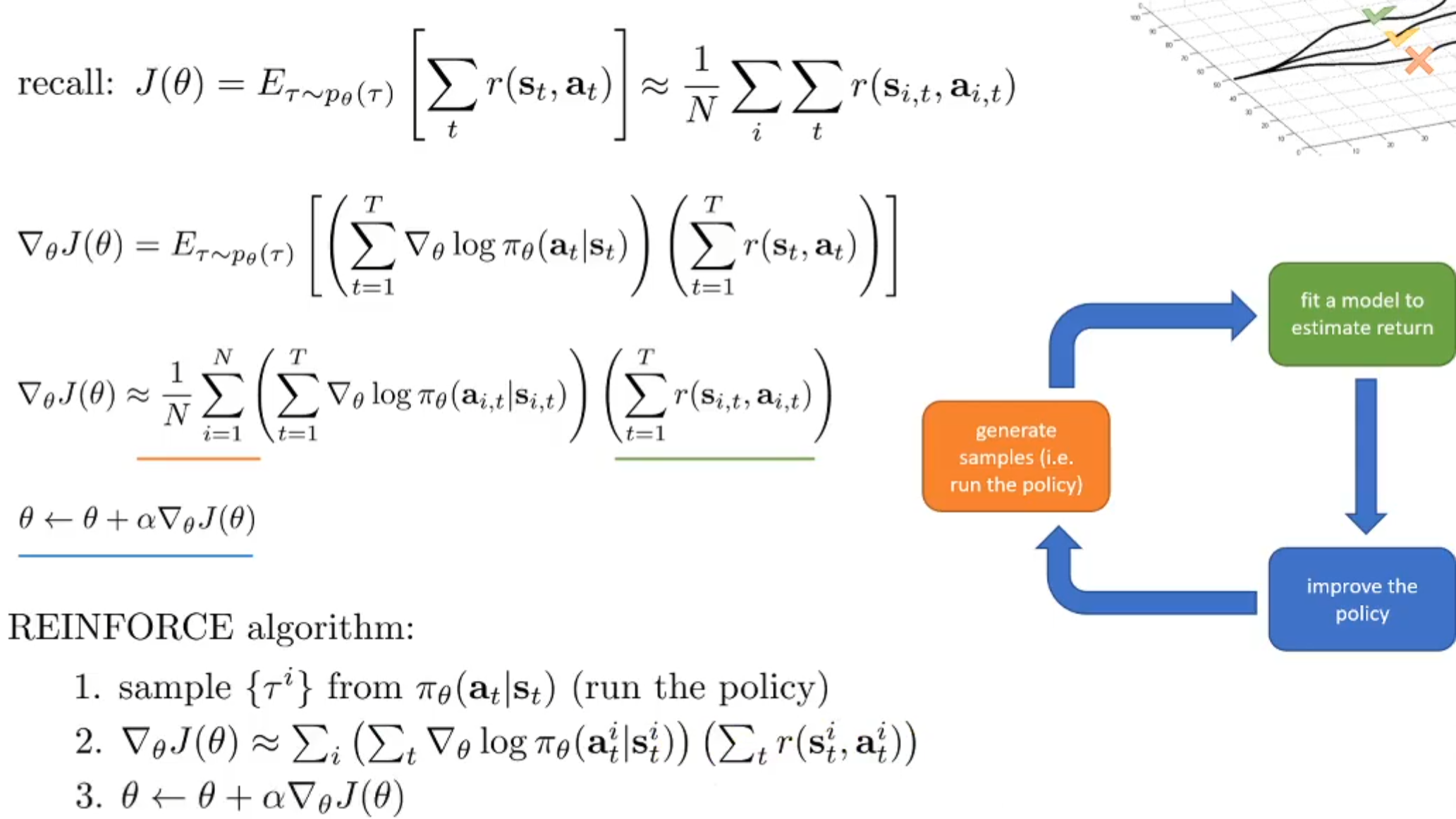
Policy Gradient的绿色部分是Average Expectation of Reward,而它的计算是使用样本结果来计算的:
Recap:$$
这便是learning objective。那么有了目标函数,其梯度是更新参数的重要依据:
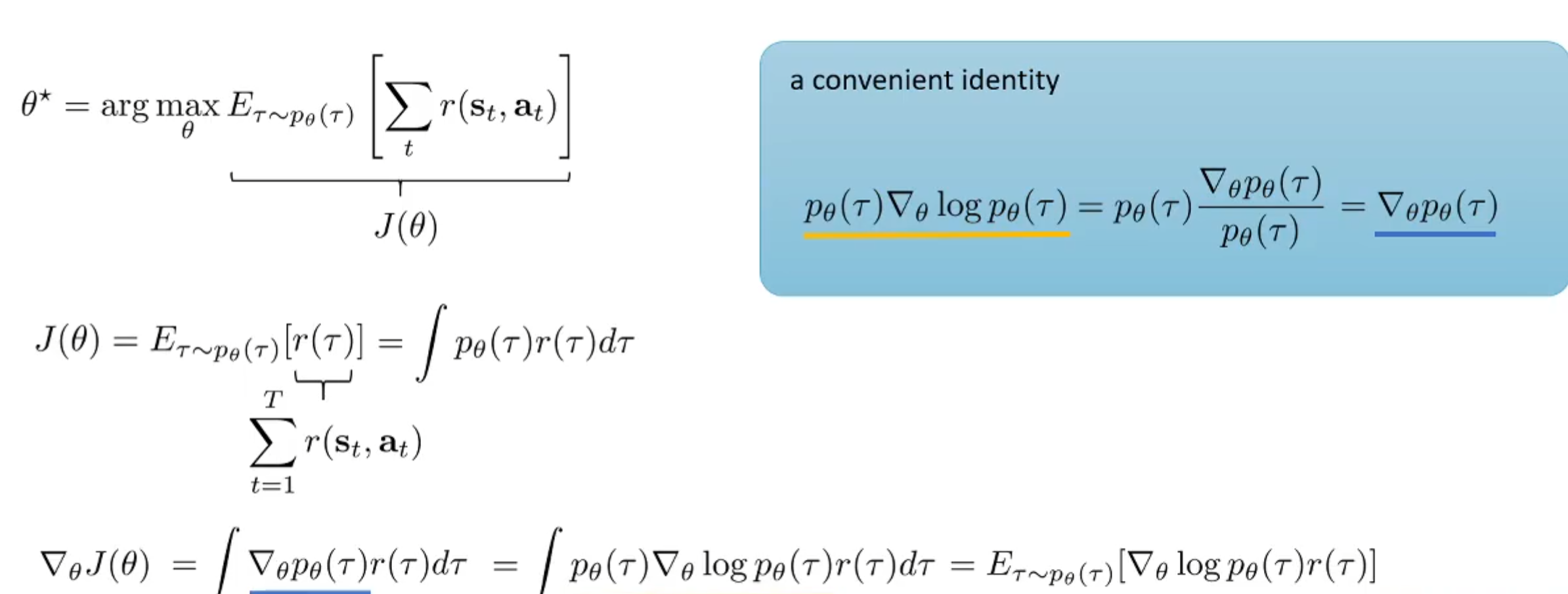
如上图的公式所述,目标是找到使得期望最大的参数\(\theta^\star\),从而对目标函数对\(\theta\)求导。使用蓝框中的一个求导式子的技巧,替换导数中的式子,则可以得到:梯度式子其实是一个期望。直觉上理解,是\(\nabla_\theta \log p_\theta(\tau) r(\tau)\)的期望。
我们可以将\(p_{\theta}(\tau)\)的实际式子根据马尔科夫性质进行展开,则其对数将连乘转化了summation。那么可以注意到,transition model是完全与\(\theta\)无关的,初始状态的分布也是与它无关的,那么我们可以进一步的改写式子如下:
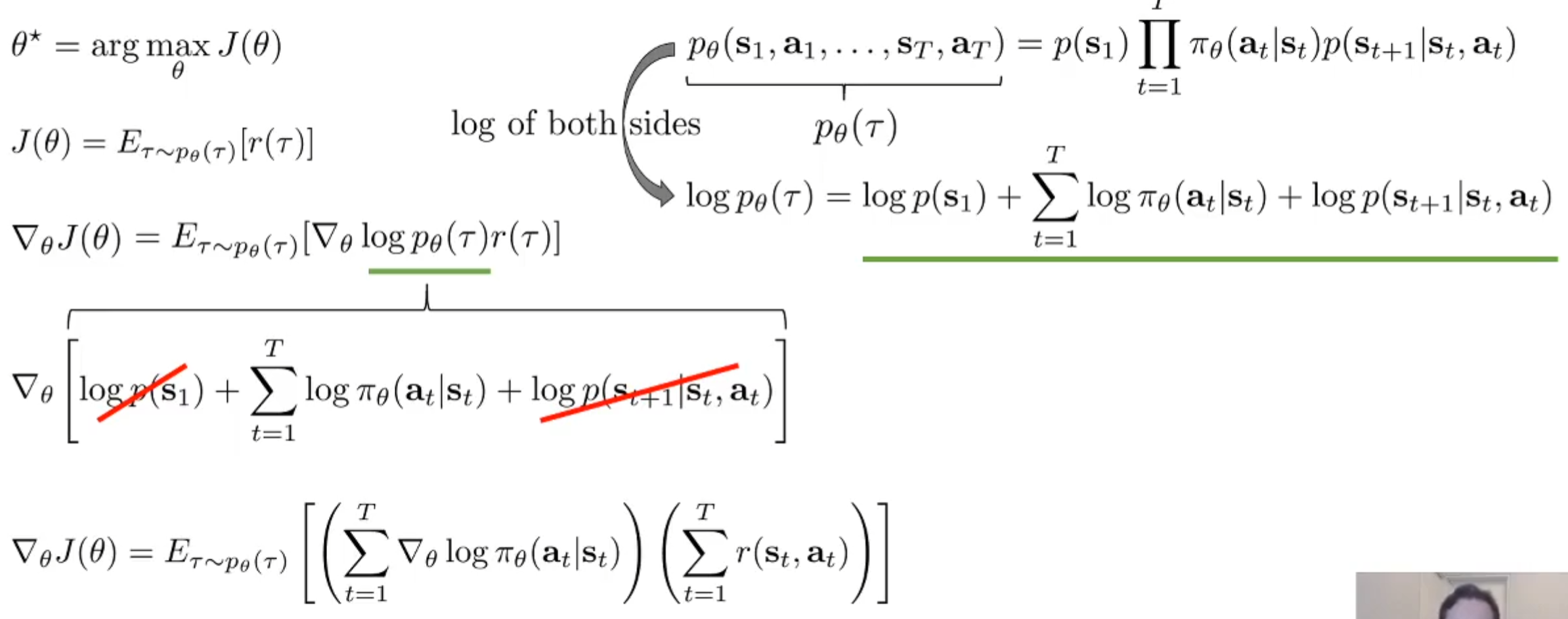
这么做的原因是为了更直观的求\(\nabla_{\theta}logp_{\theta}(\tau)\)。这样就有了Policy Gradient算法流程的sketch。如下:
Understanding
Intuitively,这样的更新方式,会使得reward很高的一个时间步的state当时的policy action choice的似然概率提升。这是很符合直觉的,即再次遇到这个state的时候,选中样本中这个reward很高的action的概率上升。

另外,假设如果没有奖励机制的存在,那么根据MLE,如果learning objective是最大化似然,那么根据更新公式来看,其仅仅是根据后验拟合先验: 但是后验拟合先验很明显没有考虑这个样本质量的高低,但是引入了reward之后,可以用作权重来进行调整。可见,Policy Gradient的更新公式可以视为最大似然目标梯度的一种加权版本。
同时,如果是partially observed scenario,那么reward式子其实是不变的,只不过是似然中的state要改成observation,然后其他的式子都不需要改变了。这是为什么?因为Markov性质在更新式子中其实没有体现。
Reducing Variance
Causality Trick
但是Policy Gradient也不是无敌的。它的表现很大程度上取决于样本的数量,因为it suffers from high variantion,只有样本数量上去了,方差才会下降到合适范围。接下来将会介绍降低方差的方式。
首先先引入因果性的概念:Causality: policy at time t′ cannot affect reward at time t when t<t′
我们可以对梯度公式进行进一步的改写(根据分配率): 由于因果性的概念,对于一个对数似然概率的权重,在t之前的时间步,其partial total rewareds其实都不影响(感性理解,对于t时的policy action choice,前面的reward其实与这个choice无关,其当然不该算进权重内),因此可以近似把后面的reward项改成不再是整个trajectory的总reward了,而是t之后的总reward: 通常把\(\sum_{t'=t}^T r(\mathbf{s}_{i,t'}, \mathbf{a}_{i,t'})\)这一项称为'reward to go',常用\(\hat{Q}_{i,t}\)来表示。这样一来,会将reward项的大小下降,而数值下降会带来方差的缩小。
Baseline
为了衡量后人发明的种种降低方差的方式,我们需要设置一个baseline,其performance是新方法的最低标准。Baseline如下。
一个很好的降低方差的方式是中心化。可不可以对于一批样本来说,求出平均total reward,然后每一个样本的reward都减掉平均值呢?这是一种很好的做法。而下图中也展示了这样操作之后,梯度更新的合法性:
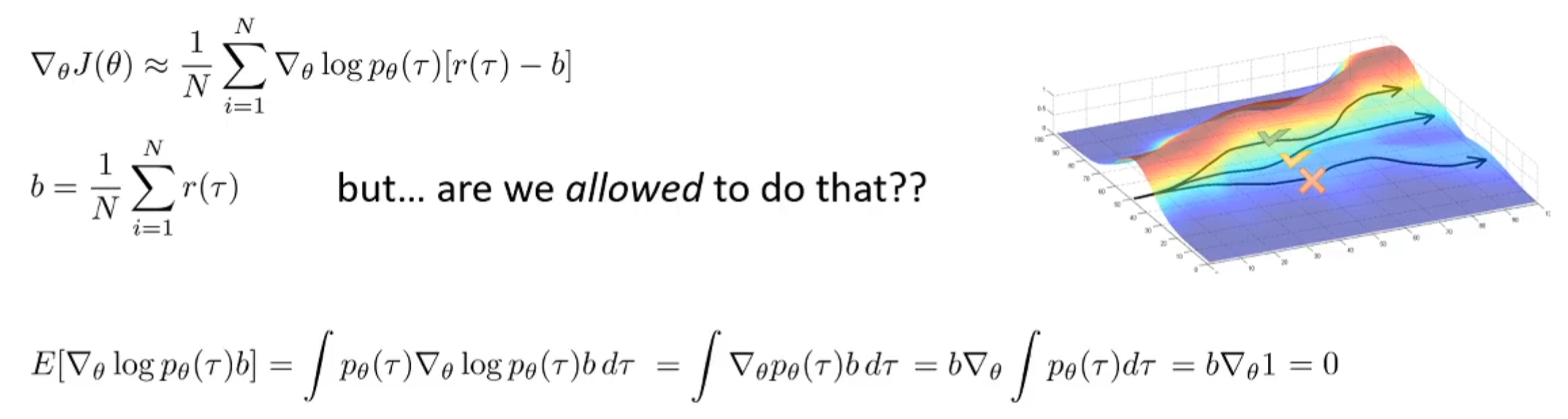
然而事实上,减去平均值并不是best baseline。但是通常这的表现已经很好了!那么什么是best baseline呢?减去哪一项呢?推导如下:
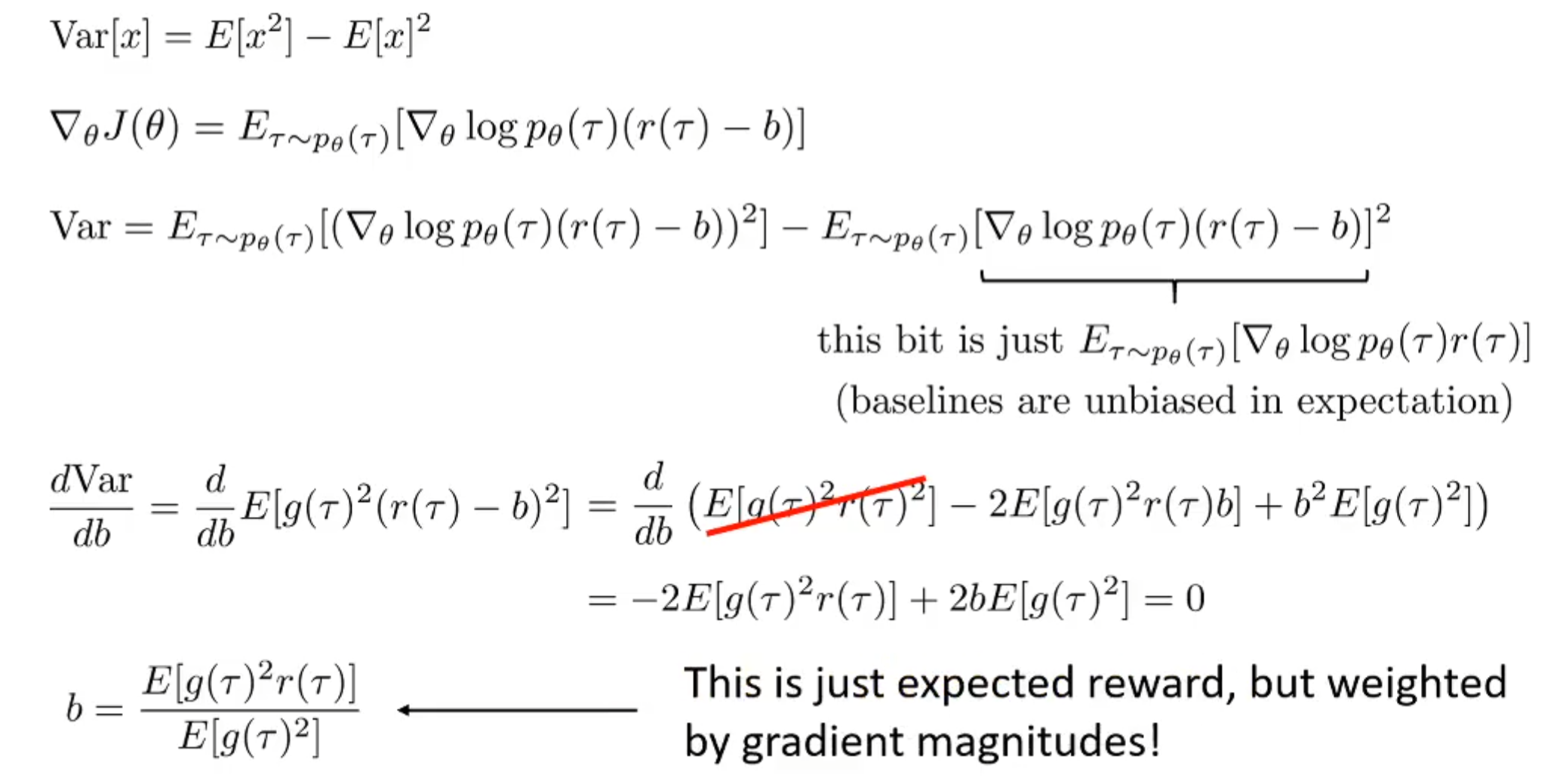
根据概率论的知识点,写出方差关于期望的公式,代入式子。后一项根据前一张图中的推导,证明了期望全体减去某一个值,其并不会对梯度更新公式的validity造成影响,换而言之,后一项的期望值和原来的是一样的,与b无关。因此起作用的是前面一项,对其求导,其导数为0然后求解b,可得最终的结果。
最后声明:虽然有best baseline,但是average method已经表现得很好了,而且computationally friendly。因此常用average method作为基准线。
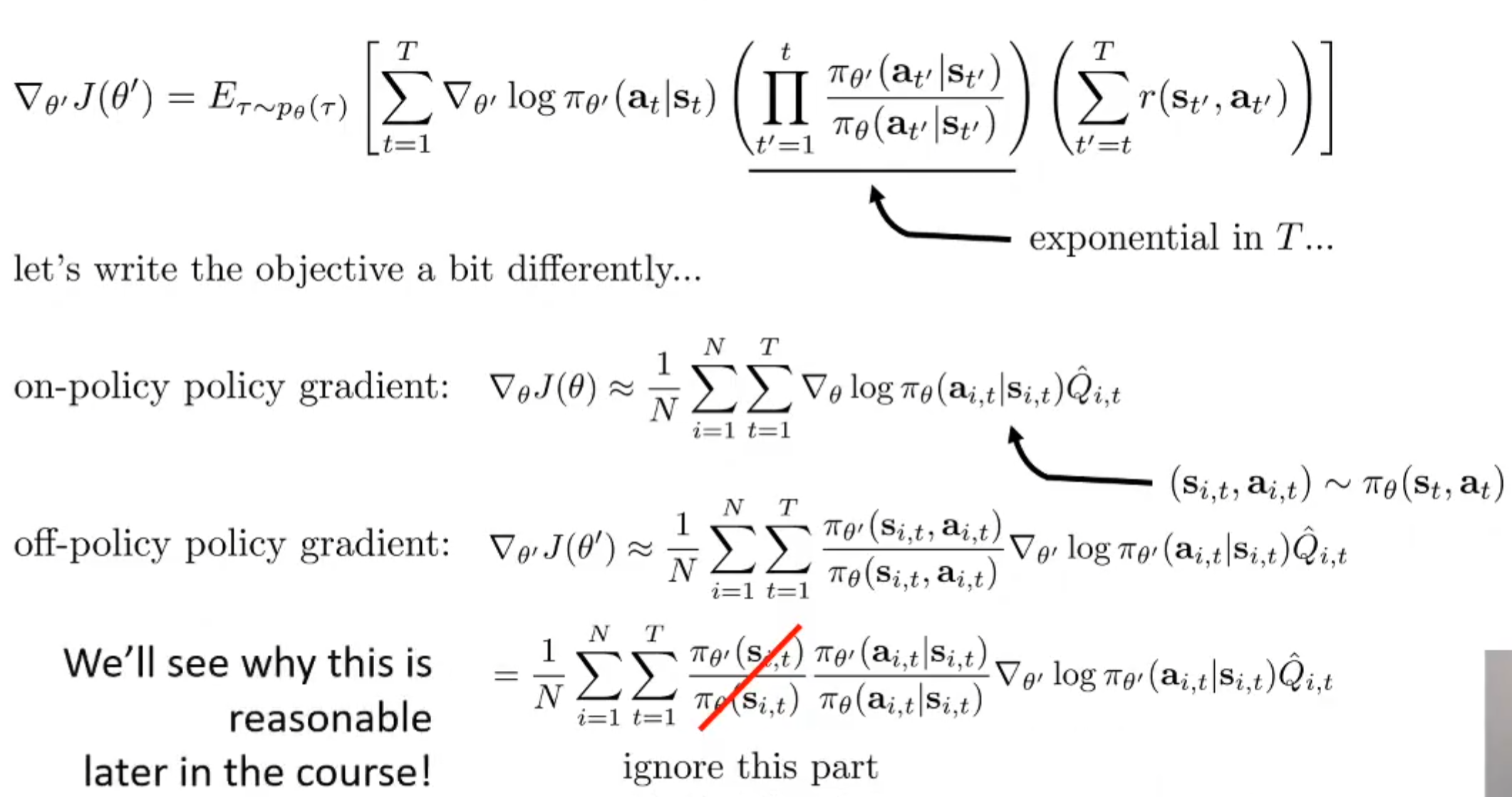
Off-Policy Policy Gradients
关于这个方法,之前提过,最致命的一点是:每一次更新完参数之后,需要根据这个新的policy生成新的样本才行。对于sample generation非常困难的task来说,是很难受的。 上面式子中的\(\tau \sim p_\theta(\tau)\)是最致命的。下面将介绍Importance Sampling方式。
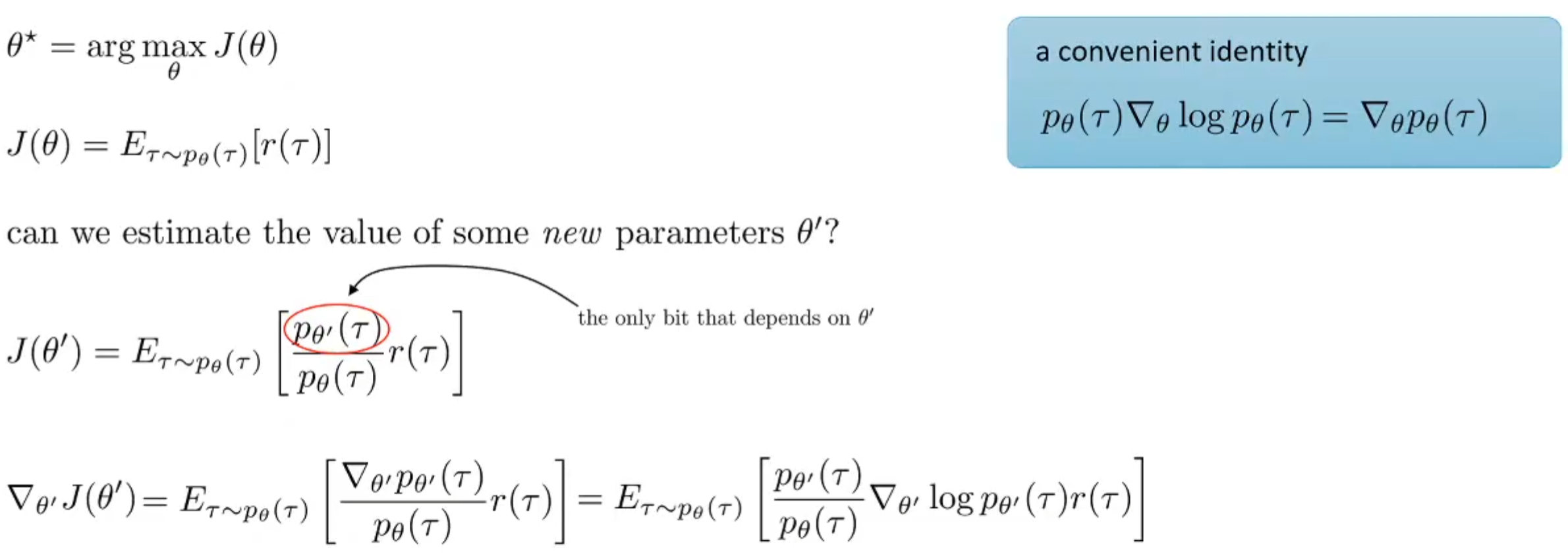
和推出KL散度的手法很相似,对于新参数\(\theta'\)的更新可以根据上述的式子进行改写,推出新的梯度公式,并且注意到依然是\(\tau \sim p_\theta(\tau)\),而不是\(\tau \sim p_{\theta'}(\tau)\)。在期望式子中,前面的分式就是重要性权重。
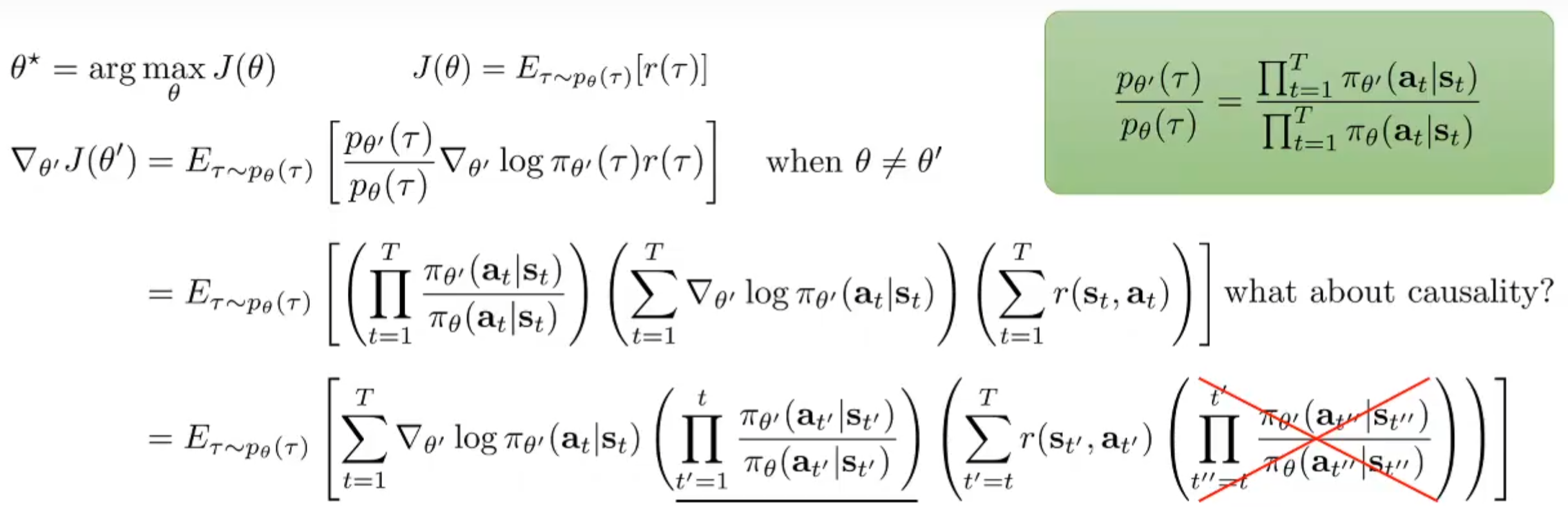
进一步地展开公式,红色画叉项如果忽略,那么就会得到脉冲迭代算法(pulse iteration algorithm)。虽然这个式子不再是梯度,但是依然对于改进policy有作用。