Reinforcement Learning
Intro-Double Bandits
考虑下面的这样一个场景:
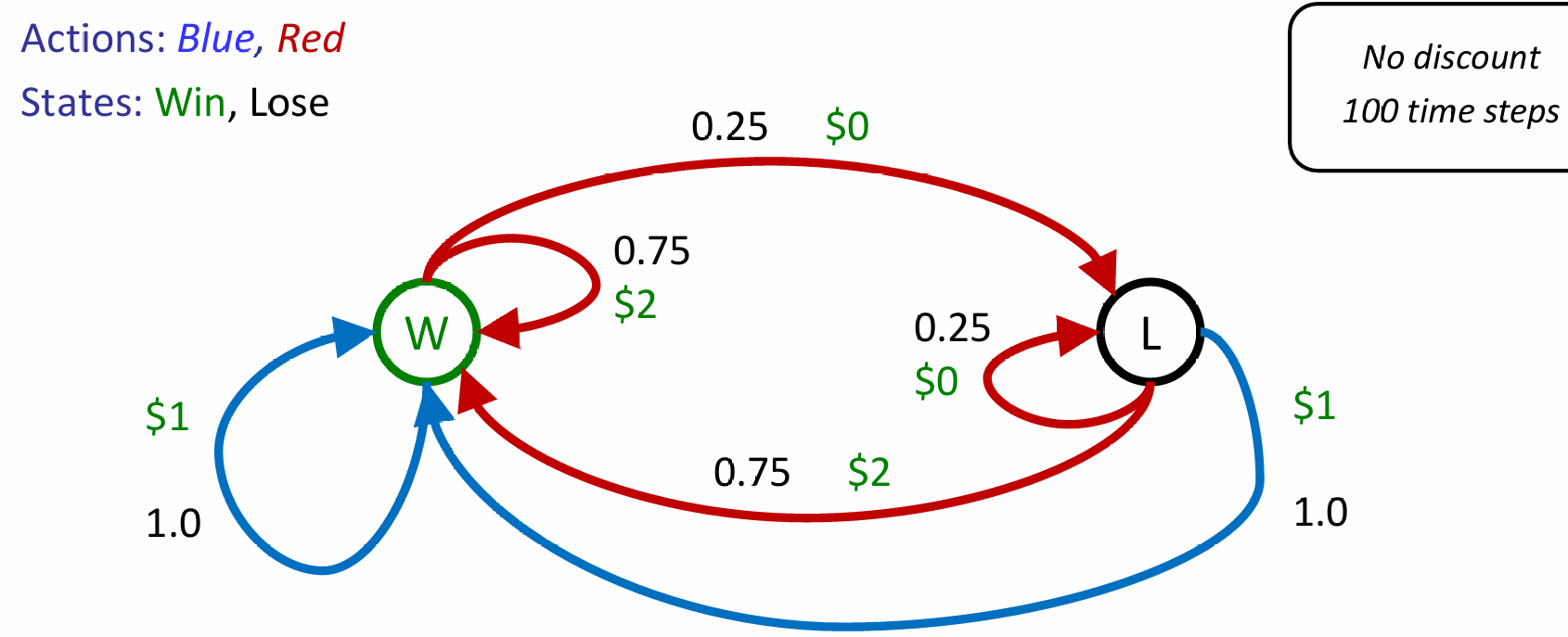
再这样的一个场景中,由于我们知道过程中的所有reward, action,因此其实我们都不需要玩这个游戏,都能对MDP进行推演。甚至能直接推出:全部选择蓝色的期望是100,而全部选择红色的期望是150
假如说规则改变了:红色策略的各自可能情况的reward不变,但是win chance发生了改变——我不知道win rate是什么。那么此时发生了什么?This wasn't planning, it was learning!(More specifically, reinforcement learning)
很明显这依然是一个马尔科夫过程,但是我们无法计算,很多的细节、概率需要自己进行行动(act)才能知道!因此感性理解这就是一个exploration and exploitation trade-off——我需要一定的多样行动,来探究概率;而最终,我们必须使用之前学到的东西。具体许多idea如下:
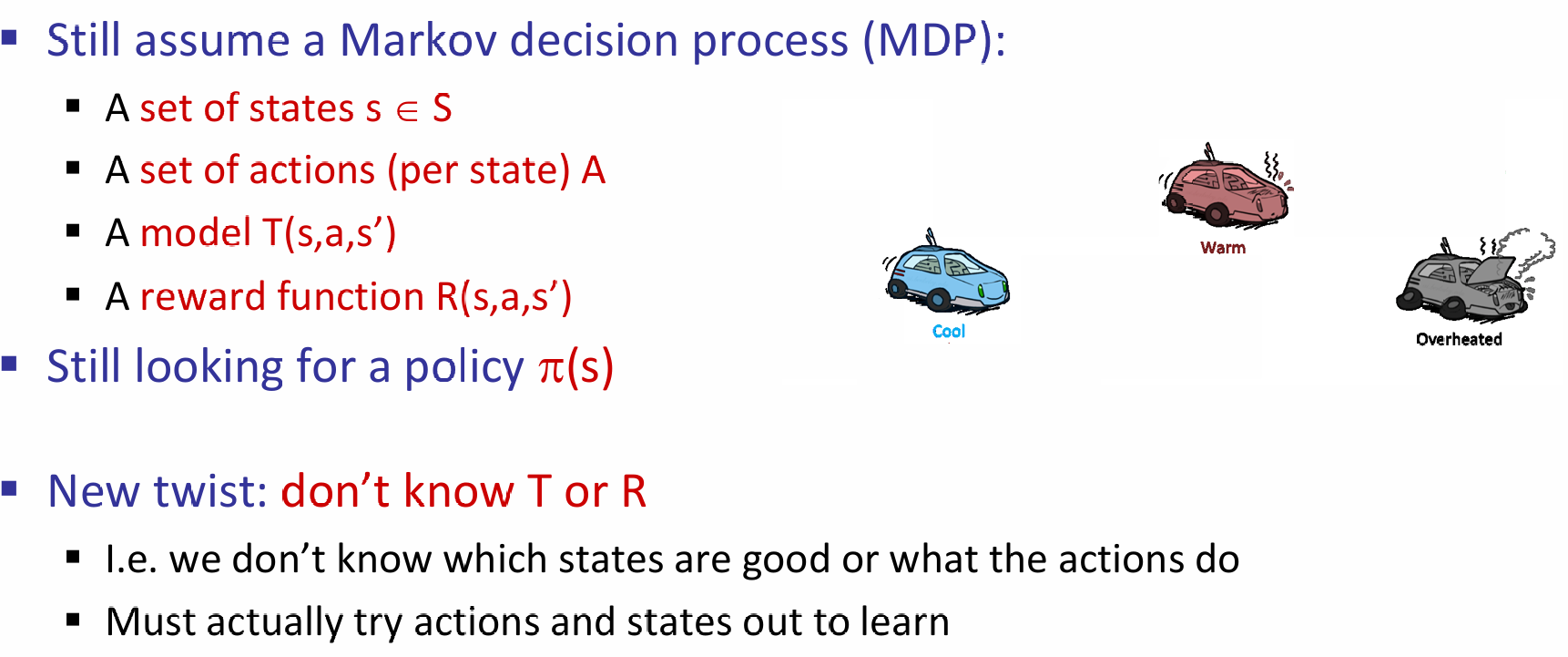
用之前的例子再一次举个例子:在赛车加速或降速的例子中,我们知道了cool warm overheat之间的状态转换的概率和reward,但是强化学习问题背景下,就是这两者都是不知道的。但是,依然这是一个MDP,我们依然寻找的是一个policy:
Learning
在这样的一个问题下:如何学习呢?基本的想法是:
- 采取行动然后观察结果(包括:新到达的状态,以及收获的reward)
- 学习是基于观察的结果样本的
- 必须学习如何采取行动以最大化期望奖励
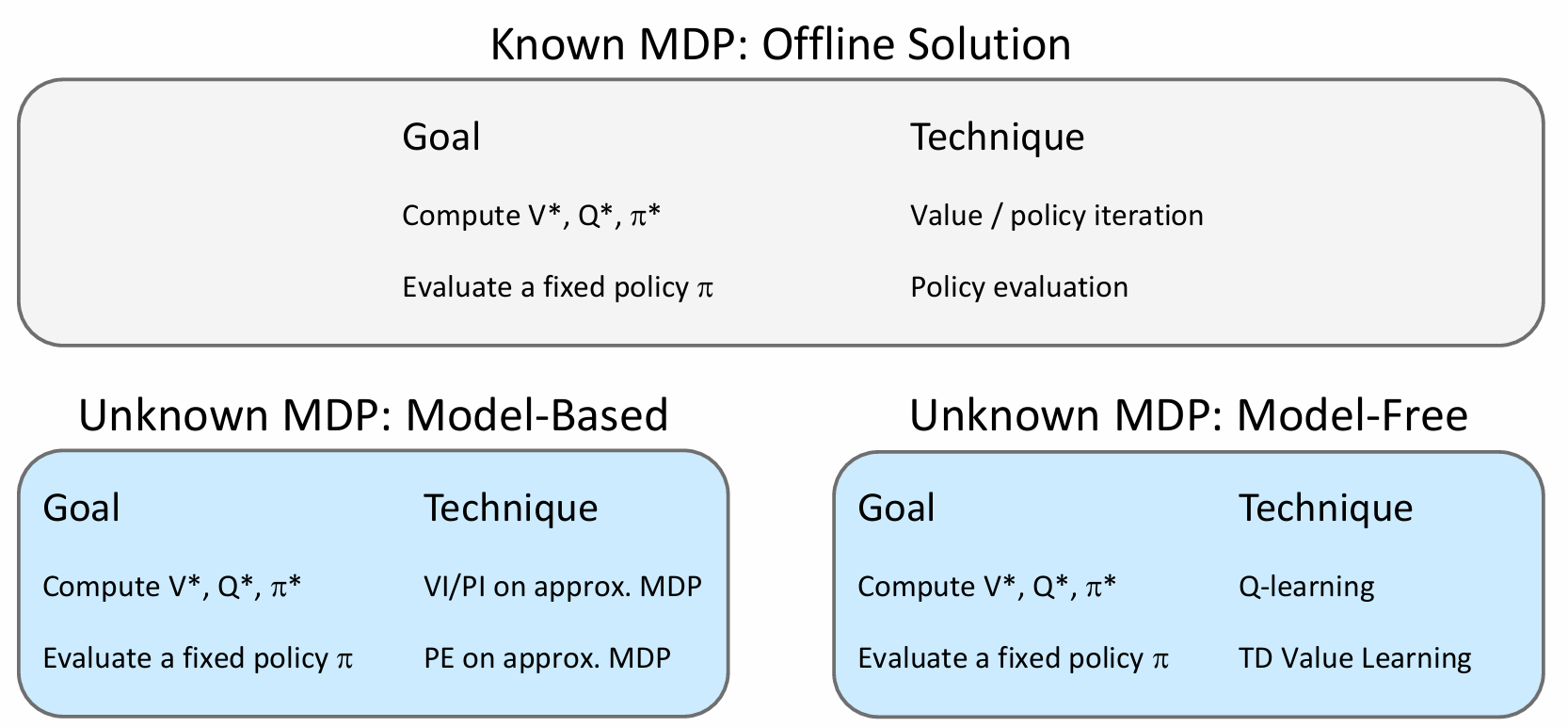
很显然与上一节的MDP解法不同的是,在一个状态下,采取不同行动所收获的不同可能的结果都是提前知道的,但是现在,我们不知道,我们必须采取可能行动中的一个行动,然后观察发生了什么。这一种学习思想称为:Model-Based Idea。即:
- 根据现有经验来学习近似的模型
- 最后运用近似模型的过程中,就当做近似模型就是真实模型,然后进行MDP的策略求解
Two Steps: Learn empirical MDP model, and then solve the learned MDP(like value iteration)
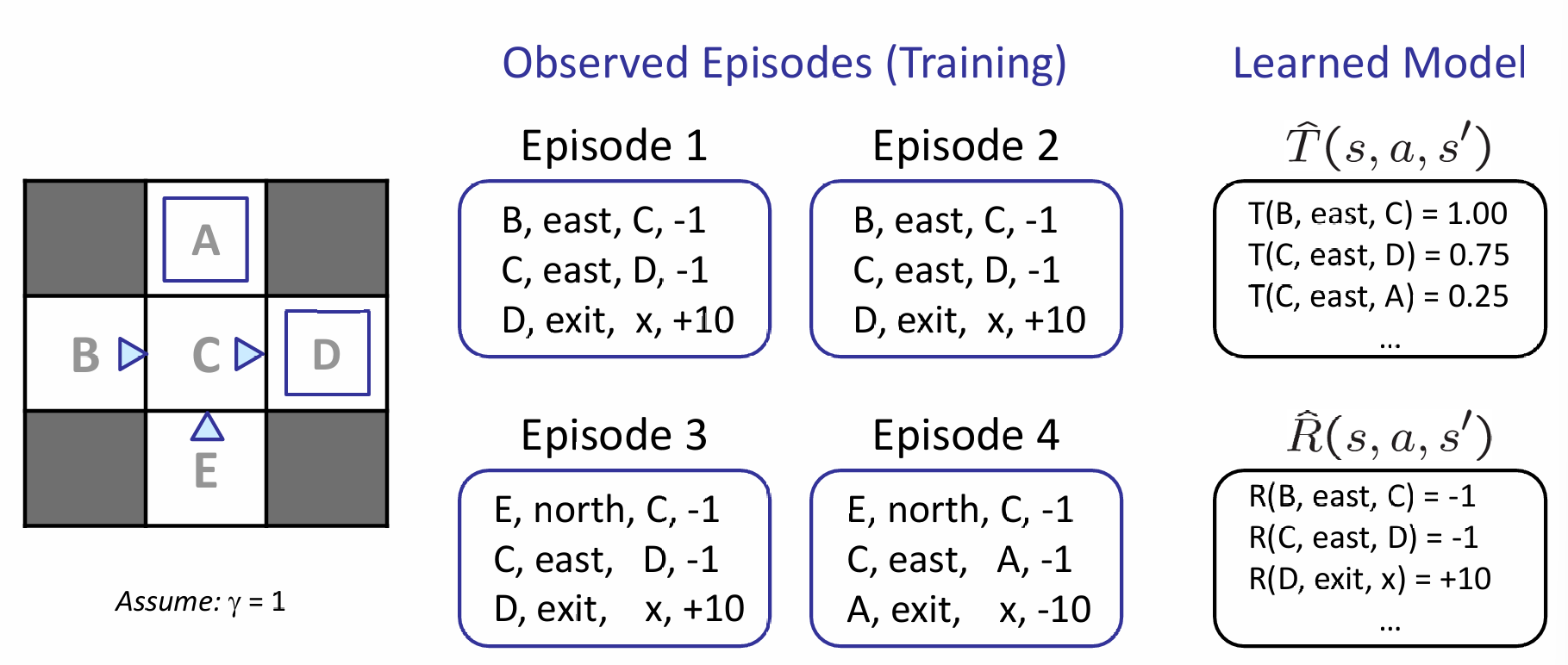
下面是一个非常生动形象的observed episode推出learned model的例子:
Passive Reinforcement Learning:
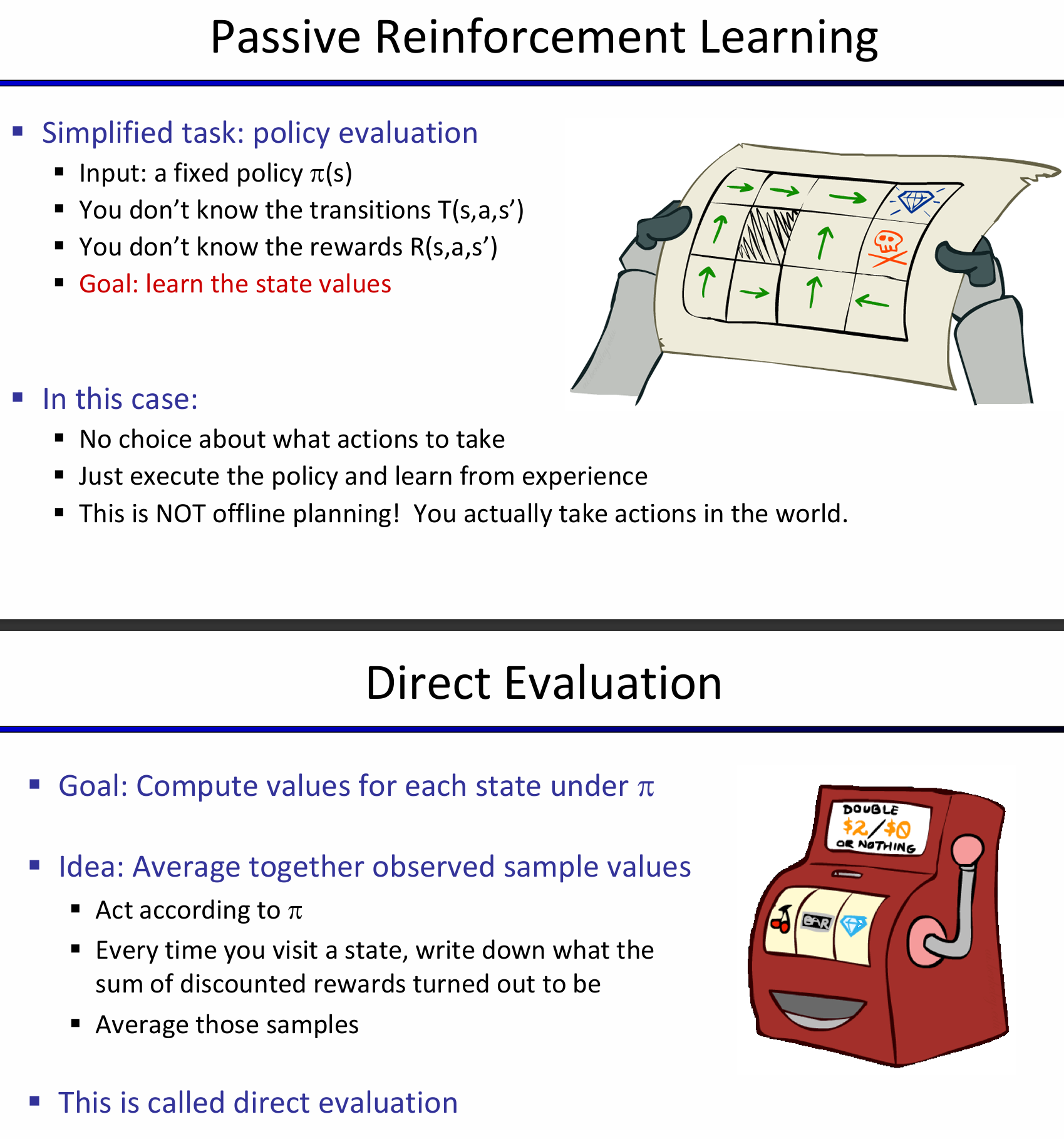
那么discounted rewards是如何计算的呢?就是从这个状态开始,按照流程执行,之间所有的reward和。对于output value for this state,就是所有episode下该state的reward和的总和,除以episode的数量。
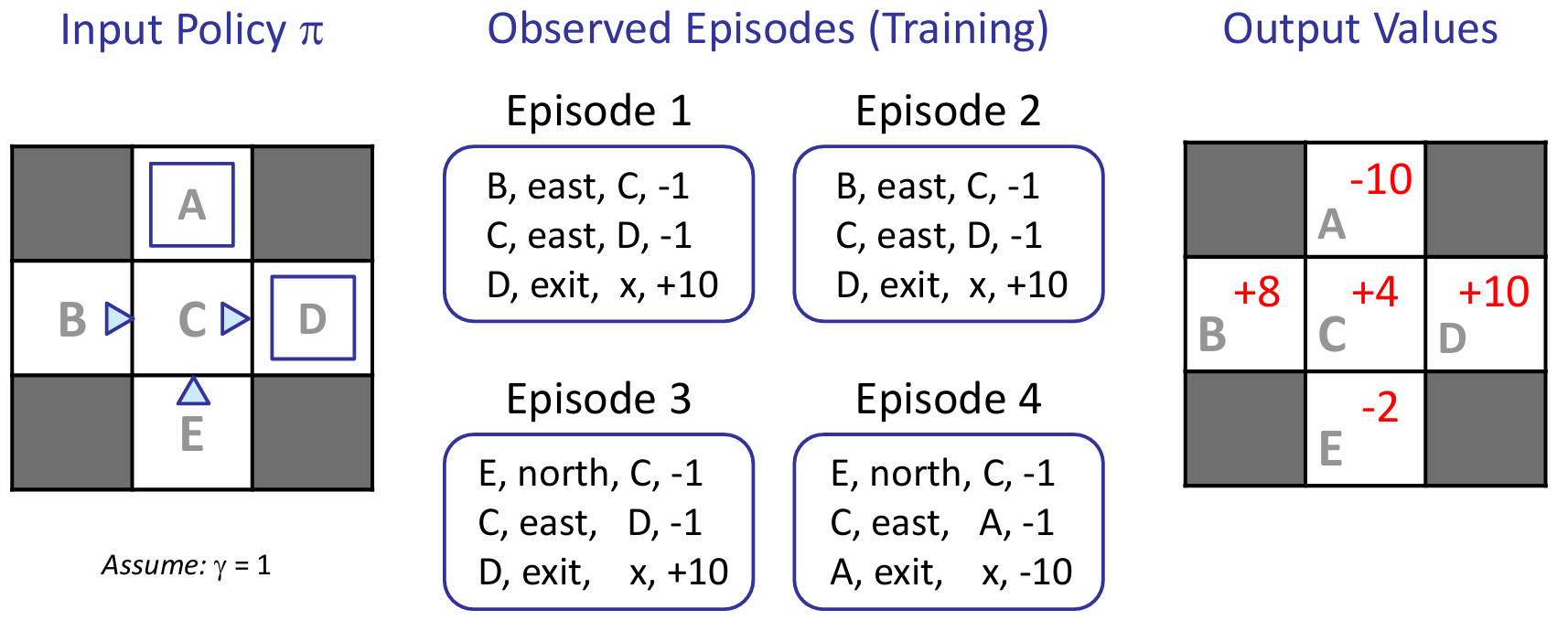
上图例子中的C:Episode1 2 3的discounted value都是-1+10=9,4是-11,所以平均下来是(9*3-11)/4 = 4。Direct Evaluation的确能够很好的衡量一个节点代表的reward期望,而且非常容易理解。不需要T R的任何只是,最终就是计算correct average values using sample transitions。
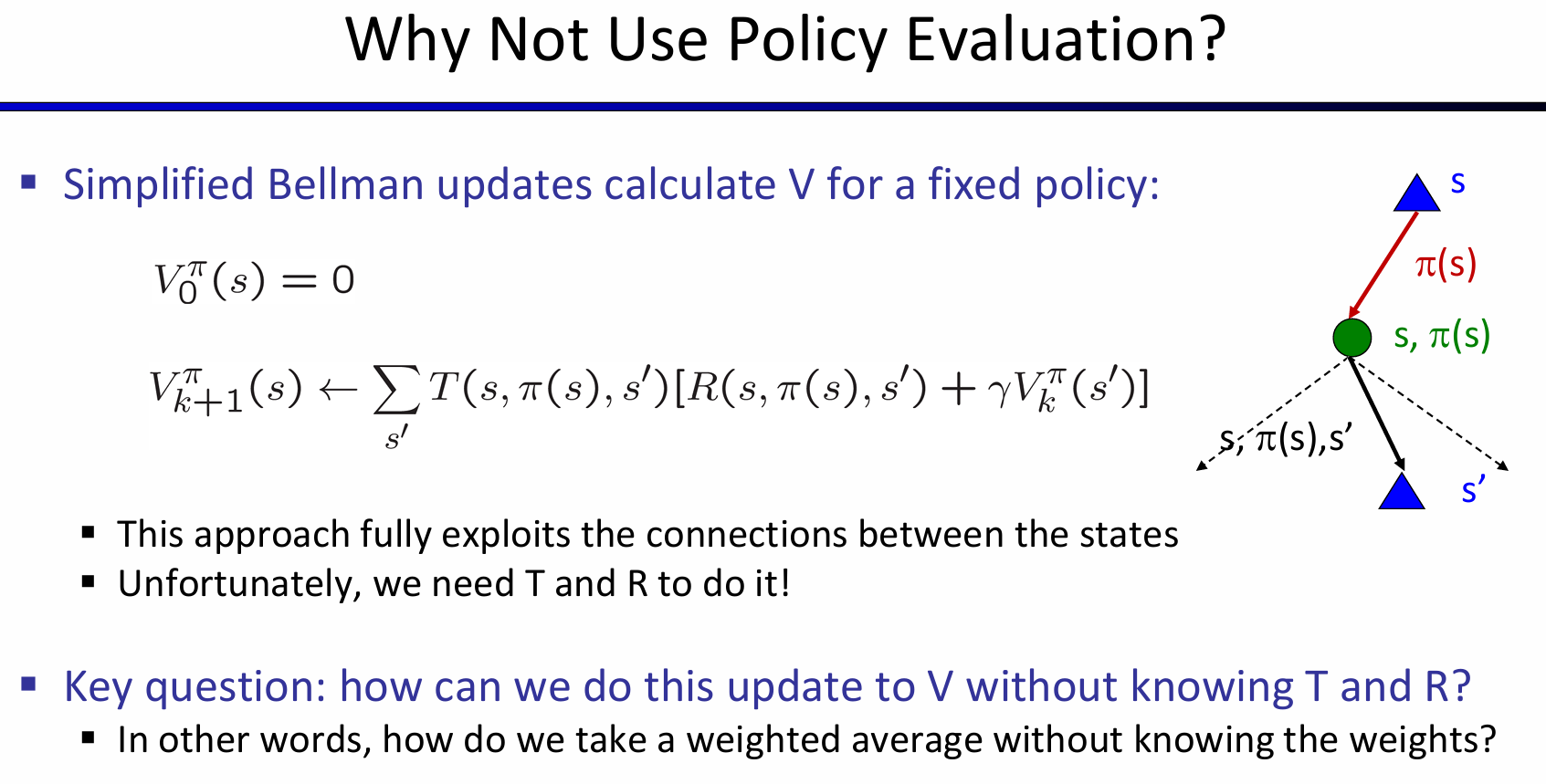
但是也是有弊端的:首先,浪费了状态之间关联的信息;其次,每一个状态都必须要单独学习出来;最后,学习时间很长。其中最重要的,是T R的信息没有显式的学出来。
那么这些弊端决定了Policy Evaluation方法并不适合用来辅助解决MDP问题:因为MDP非常需要T R的信息,但是这个方法并没有提供这些信息。所以关键问题来到了:如何在不知道TR信息的前提下实现bellman equation中的update?换而言之:
How do we take a weighted average without knowing the weights?
那么一种想方法就是:take samples of outcomes by doing action and take the average!我通过随机行动,来随机采样结果,那么平均一下即可!采取的随机行动应该是服从Transition分布的。但是这样一来,需要能够采取一个行动,抵达下一个状态,然后返回之前的状态,重复循环。但是通常来说:we can't rewind time to get sample after sample from state s!
于是有了一个大胆的想法:learn immediately from every experience!每一次经历一个transition,都进行一次V(s)的更新:
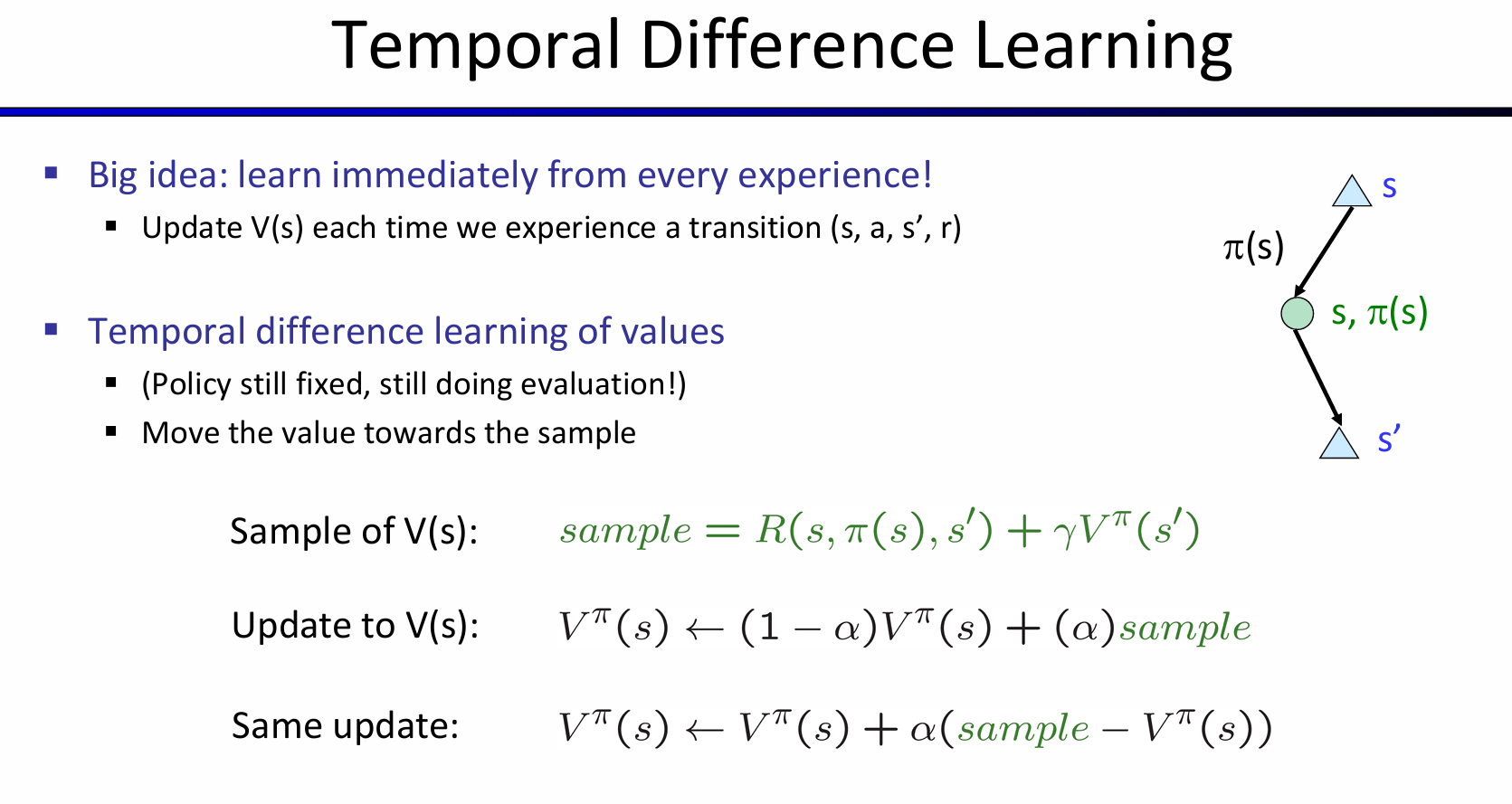
按照时序进行sequential action sampling,每一次的action将会收到reward,以及接受下一个状态的state value。按照一定的比例组合起来,将用于之前这个state value的更新。TD value learning可以很好的拟合每一个状态的state,但是当我们需要做决策的时候,transition and reward这两个信息是没有的!
这个问题启发我们:learn Q-values, not values!
Q-learning
Q-value iteration是十分重要的,这个式子的设计可以灵感来自于value learning中对state value的更新: 那么和TD value learning类似的:每一次随机采取一个行动,将会得到: 然后更新:\(Q(s,a)\leftarrow (1-\alpha)Q(s,a)+(\alpha)[sample]\)
在全强化学习(Full reinforcement learning)中,代理(agent)并不直接知道环境的转移函数 T(s,a,s′) 和奖励函数 R(s,a,s′),这意味着:
- 不知道转移函数T(s, a, s'):代理不知道从状态 s 执行动作 a 后会转移到哪个状态 s′,也就是环境的动态过程是未知的。
- 不知道奖励函数 R(s, a, s'):代理不知道在每次状态转移时会获得什么奖励 r。
- 当前选择动作:代理需要根据当前的估计来选择动作,而不是事先知道所有的结果。
目标:通过与环境的互动,代理的最终目标是学习最优策略和最优值函数,也就是说,要找到使得未来奖励最大化的行为策略。在全强化学习中,代理(agent)并不直接知道环境的转移函数T(s,a,s′) 和奖励函数R(s,a,s′),这意味着:
Q学习 是一种强化学习算法,代理根据当前的值函数和策略来选择动作,同时还会进行探索以改进决策。具体特点如下:
- 代理根据当前的值函数/策略选择动作:代理通过估计的 Q 值函数(状态-动作值函数)来选择当前最优的动作,但它同时也可能进行探索,即尝试新的、未知的动作。
- 探索与利用的权衡:
- 探索(Exploration):代理尝试新的动作,目的是获取更多的信息,了解环境的动态,从而能够做出更好的决策。
- 利用(Exploitation):代理根据当前已有的信息(如已学到的 Q 值)选择最有可能带来最大回报的动作。
- 这是一个根本性的权衡:代理必须在利用已知的最优动作和探索新的可能性之间做出选择。过多的探索可能导致较低的短期奖励,而过多的利用可能错过一些潜在的长期回报。
- Q学习并不是离线规划:这意味着,Q学习并不依赖于已知的环境模型来预先计算最优策略,而是代理在环境中不断地采取实际行动,并从环境反馈中学习。
- 在Q学习中,代理通过实际与环境的互动(例如在迷宫中走动或在游戏中尝试动作)来不断调整它的策略和价值函数。
- 代理通过不断的试错过程来发现不同动作的结果,并根据这些经验来逐步改进其行为策略。
这种不需要知道T R的学习方法效果怎么样?出乎意料的是,惊人的好,常常收敛到最佳策略!即使采取的行动序列是次优的!Q-learning是一种off-policy learning!
Story so far
Exploration and Exploitation
之前提及过,需要一部分的时间和行动来进行探索,然后最终用学习到的来获得更高的分数,这就是探索和利用的平衡。如何探索呢?
其中最简单的一种方案是 ε-贪婪(ε-greedy) 策略。
ε-贪婪策略(ε-greedy):
- 每一步都抛一次硬币,决定是否采取探索性动作。
- 以小概率(ε的概率),代理会随机选择一个动作,即进行探索。
- 以大概率(1-ε的概率),代理会选择根据当前策略选择的动作,即进行利用,最大化奖励。
- 这种方法的核心是:
- ε 控制了探索和利用之间的权衡,较小的ε意味着代理更多地利用已知的最佳策略,较大的ε则意味着代理更多地进行随机探索。
存在的问题:
-
通过随机动作来强制探索,存在一定问题:
-
代理最终确实会探索整个环境,但一旦学习完成后,仍然会继续进行探索,这会导致代理在已经学会了最优策略后仍然“乱打乱撞”。
- 这种方法在学习过程中可能会导致效率低下,因为即使代理已经学到有效的策略,过度的探索会使得代理的行为变得混乱。
一种解决方案是随着时间逐步降低\(\epsilon\)的值。另一种解决方法是:使用一种更加智能的exploration functions。首先我们要明确:什么时候需要进行explore?这个探索是整个过程中都需要进行的吗?
- Explore states that haven't been sufficiently explored
- Eventually stop exploring
Idea:select actions based on modified Q-value
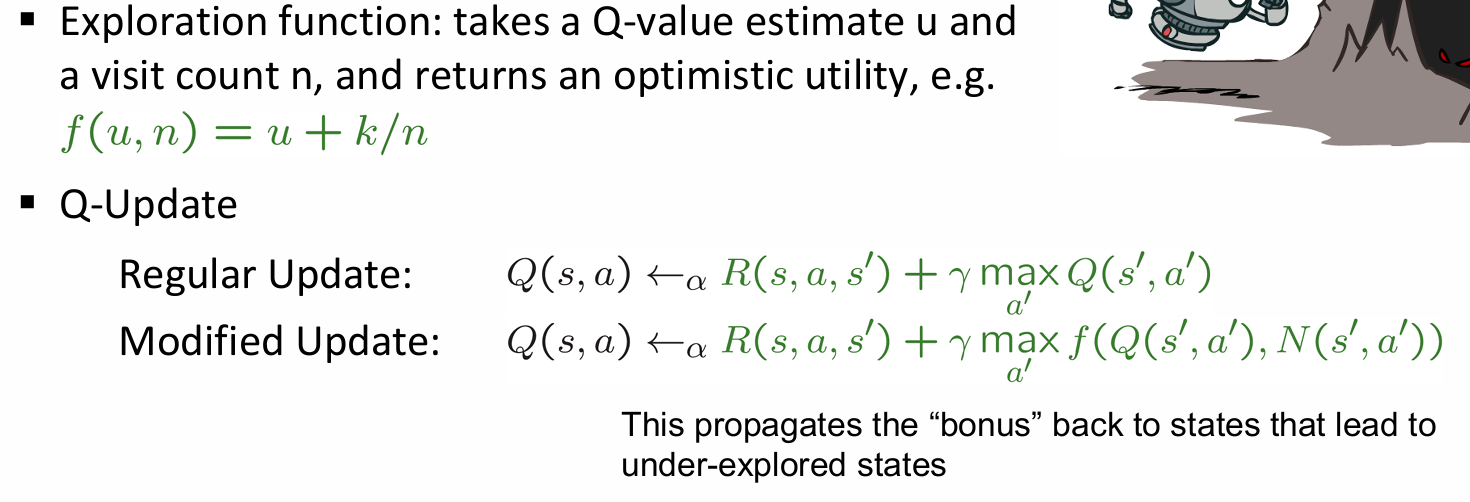
探索函数是一种方法,它结合了Q值估计(表示某个状态-动作对的价值)和访问计数(表示该状态-动作对被选择的频率),返回一个 乐观的效用值,使得代理在探索时能够更加关注未被充分探索的状态。目的是为了加强对未探索状态的学习。
Approximate Q-learning
基础的Q-learning保持一个q-values的table,但是在现实世界中,我们不可能学习到所有状态的state value!因为现实世界中,state太多了,memory存放不下。因此我们想要一种泛化能力更广的方案!
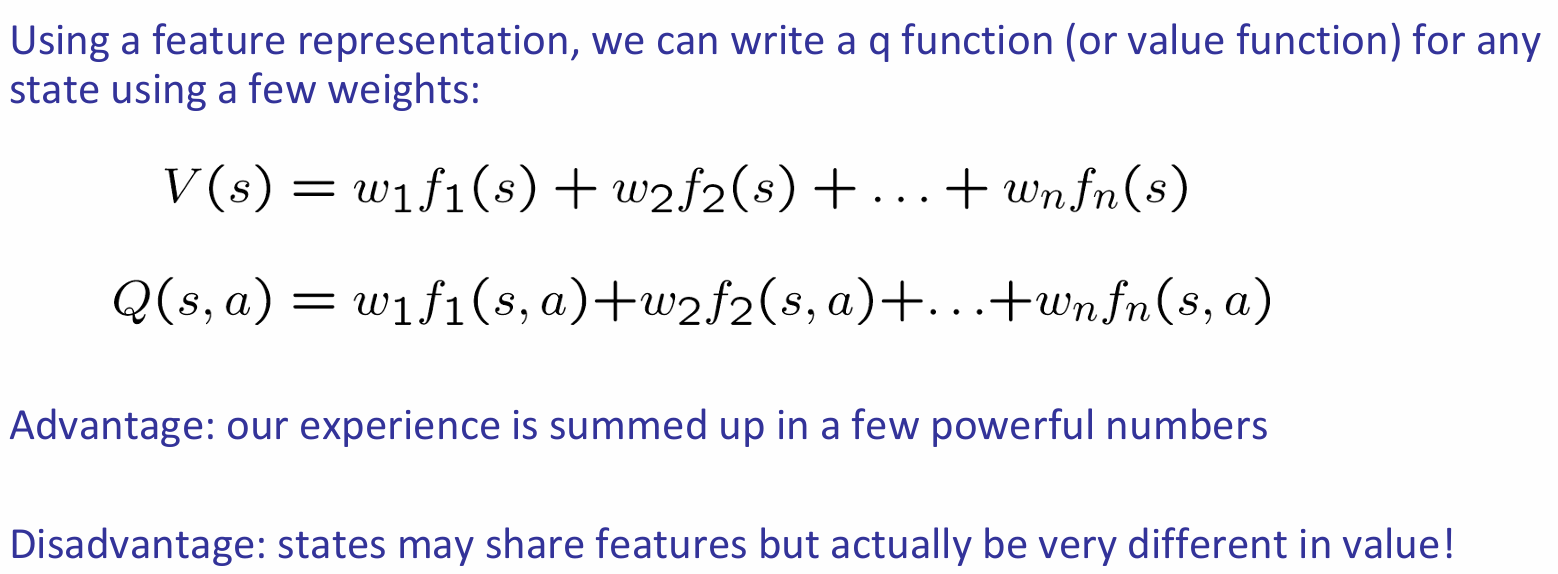
理想情况下,我们希望:学习一小部分的state,然后将学习到的内容扩展到新的、相似的情况。那么这就和机器学习相关了。首先需要介绍的是feature-based reepresentation:
与其用具体的现实参数数据描述状态,我们可以用一组代表特征的向量来描述状态。这里的feature其实就是一种函数,将一个state映射到0-1之间的一个数字。同样,也可以用这种类似的方法来表述q-state。
于是用上述的特征和一组权重,就能用来表述\(V(s),Q(s,a)\)。
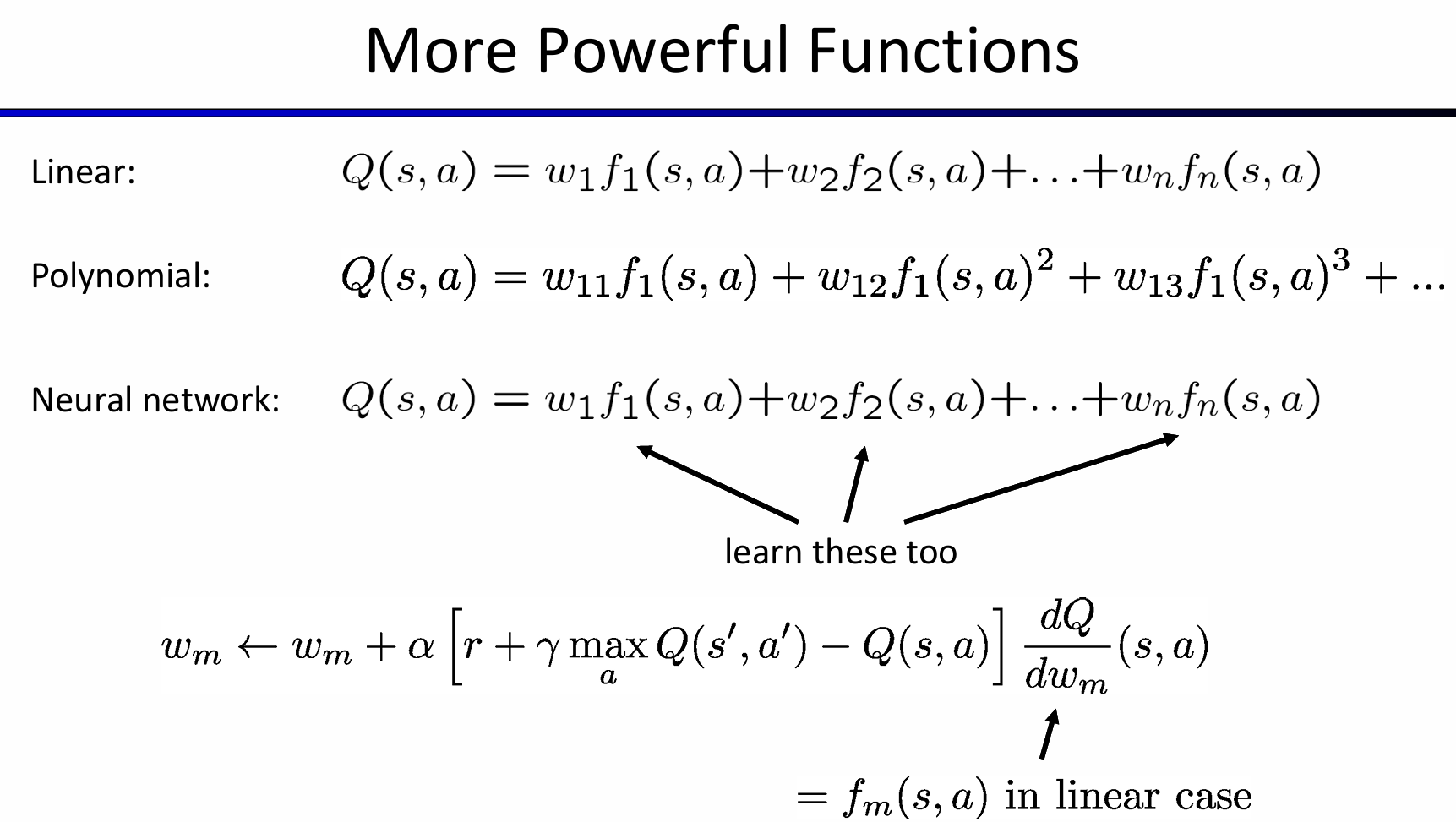
以q-state为例子,那么在这样的表述下,如何更新q-value呢?公式图如下:
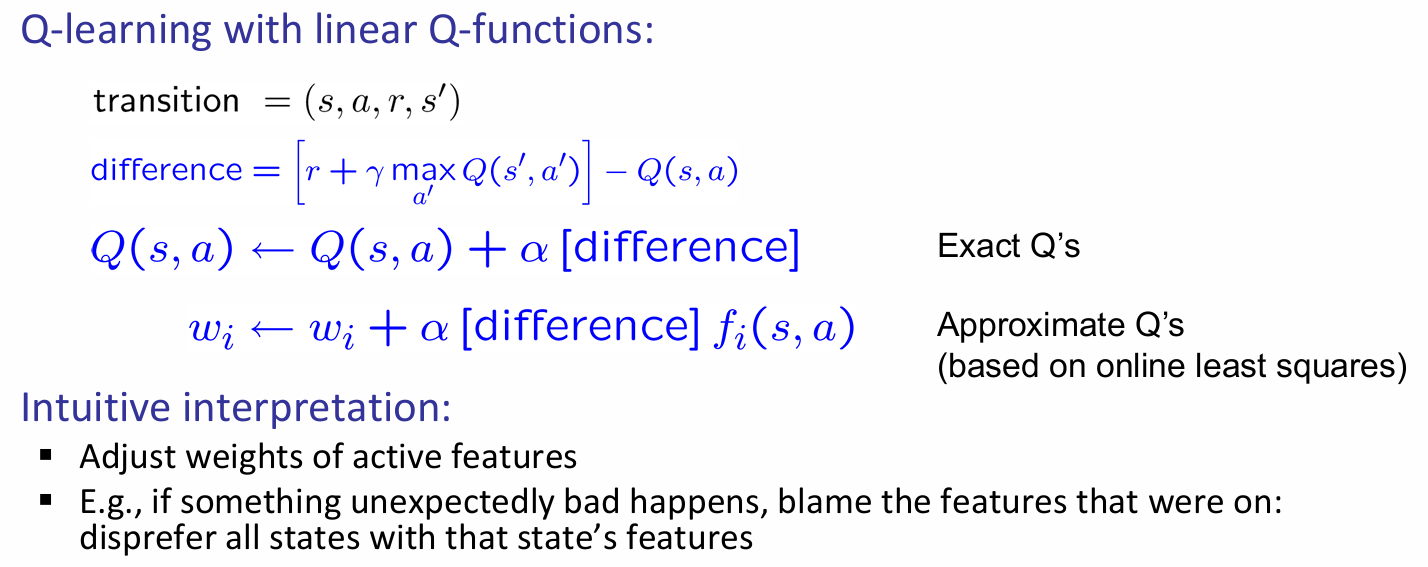
当然,由特征转化为q-value的函数可以不仅仅是线性的,还可以是多种多样的,甚至可以是神经网络的方式:
Policy Search
-
Q学习的优先级:让Q值接近
-
Q学习的目标是使 Q 值尽可能准确,通过 Q 值来做决策。Q 值代表了从某个状态采取某个动作的预期回报,准确的 Q 值能帮助代理做出最优决策。
- 然而,通过特征来生成策略并不一定直接与 Q 值的准确性挂钩。换句话说,某些基于特征的策略在赢得游戏或最大化效用时,可能并不完全是最佳的 Q 值估计。但它们往往仍然能做出有效的决策。
-
例子:在项目中,你可能计算的值函数(V)并不是未来奖励的最佳估计,但它们仍然能够产生好的决策。因此,关键在于确保Q值的排序是正确的,也就是说,准确地预测动作的优先级。
-
策略搜索的思路
-
策略搜索的核心思想:目标是 学习最大化奖励的策略,而不是仅仅关注预测奖励的值(V 或 Q)。也就是说,真正需要的是一个能够 最大化实际奖励 的策略,而不仅仅是能正确估计奖励的值函数。
- 如何进行策略搜索:
- 从一个还算不错的初步解决方案开始(例如,基于 Q 学习的近似方法)。
-
然后通过 微调特征的权重,进一步优化策略,从而得到一个更好的策略。
-
最简单的策略搜索方法
-
最简单的策略搜索方法是:
- 从一个初始的线性值函数或 Q 函数开始。
- 通过调整每个特征的权重,观察在不同权重下策略是否变得更好。
- 每次改变权重后,检查策略的表现,看是否有改进。
- 存在的问题:
- 如何判断策略是否变好了?:很难通过单一的量化标准来判断策略的好坏,可能需要多次尝试。
- 需要运行大量的样本:这种方法通常需要在不同的样本上反复训练和测试,以验证策略的效果。
-
当特征很多时,这种方法不实际:如果特征空间非常大,调整每个特征的权重可能非常耗时,而且计算开销大。
-
更好的策略搜索方法
-
更好的策略搜索方法会利用前瞻结构,即考虑未来的可能性,进行更加有效的探索。
- 明智地选择样本:选择更具代表性的样本来进行训练,避免盲目地遍历所有可能的样本。
- 改变多个参数:通过调整多个参数来优化策略,而不仅仅是单一特征的权重调整,从而加速收敛。
总结:
- Q学习的重点是确保 Q 值的排序准确,而不是单纯地追求值函数的精确性。
- 策略搜索的目标是通过搜索找到最优策略,不仅仅是优化值函数。
- 最简单的策略搜索方法是从一个基本的模型开始,调整特征权重,但这种方法在特征较多时会变得不实际。
- 更有效的策略搜索方法利用了前瞻结构、精明的样本选择和调整多个参数,以提高搜索效率和优化策略。
通过这些方法,代理可以在复杂的环境中更好地优化自己的行为策略。