Chapter 14
Time and Uncertainty (Markov Models)
States and observations
静态场景的概率推理用贝叶斯网络能够很好处理,那么动态的呢?比如说治疗一个糖尿病患者,他的血压、血糖、食物摄入以及其他信息等都是在随着时间变化的。我们要根据一段时序内观测到的,例如,血压血糖等身体信号来判断病人是否有糖尿病。为了衡量从之前的历史状态证据来衡量当前状态,并且预测之后的治疗,必须将时序中指标的变化纳入模型。
这里考虑的是离散的事件模型,也就是说时间分成了许多份的time slices。通常认为时间切片间隔都是一样的。而随机变量依然按照贝叶斯网络的evidence-query思路可以分为两类:可观测和不可观测。因此,使用\(X_t\)来代表时间t时刻不可观测到的状态变量(state variable);使用\(E_t\)来代表客观测到的依据变量(evidence variable)。对于t时刻观测到的依据变量们的具体值,用\(E_t = e_t\)来代表。称变量在时域内的一个个值为state(状态),那么不同时间下该变量值的改变,也就也可以感性理解为状态的转化(transition)。
同时,用特殊的下标来表示一个时间范围内的所有时刻的变量:\(X_{a:b} = {X_i,i \in [a, b]}\)。
Transition and sensor models
The transition model specifies the probability distribution over the latest state variables, given the previous values, that is, \(P(X_t | X_{0:t-1})\). 换而言之,transition model顾名思义建模了状态的变化,而这个变化是通过条件概率表示的。
可以注意到的是,这里的t如果无限增加,那么参考的过去的状态变量数量将会没有限制,因此为了避免这个问题有一个关键的假设:
Markov assumption: the current state depends on only finite fixed number of previous states.
满足该假设的模型被称为马尔科夫过程或者马尔科夫链。当这个previous states规定就是current time前一个时间点状态,那么就称为first-order Markov model,i.e.,\(P(X_t | X_{0:t-1}) = P(X_t|X_{t-1})\)。类似地,如果是参考前两个时间点状态,那么就是second-order Markov Process。那么推广得到:A kth-order model allows dependencies on k earlier steps。
一阶马尔可夫过程的例子:一个分子在平面上随机游走它的x轴数据应该是一阶markov,因为t时间的x数据应该仅仅和t-1时刻的x轴数据相关。
同时还有另外一个小问题:t可以取无穷大,那么状态的变化岂不是会不同时间不同(也许)联合概率分布,因此在考虑状态联合概率分布应该考虑不同时间有不同的分布?那么因此有下面关键的假设:
Time homogeneous process (Stationarity Assumption): The process of change is governed by laws and themselves do not change over time.
同时补充多个时间状态下的状态联合分布式子:\(P(X_0, \dots, X_T) = P(X_0)\prod_t P(X_t|X_{t-1})\)
举一个例子cover上述概念:
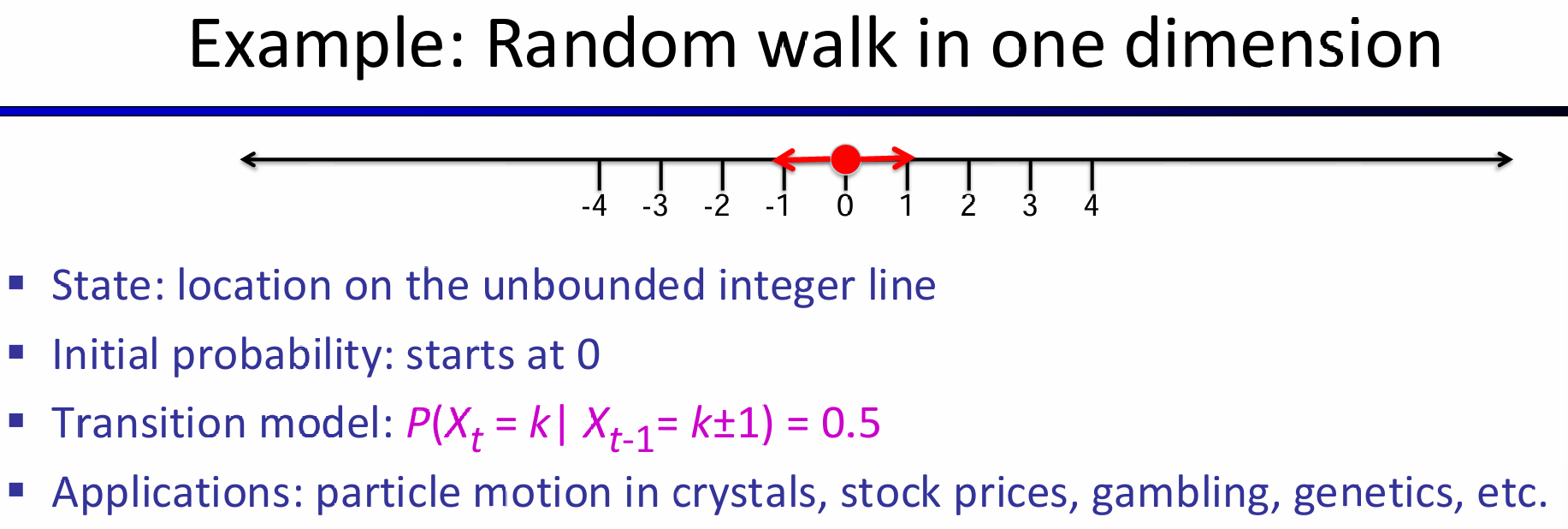
点在轴上随机游走,一次要么左走一步要么右走一步。那么状态就是轴坐标,而初始状态是0,transition model如图所示,由于明显是first order,因此Xt的值仅仅和Xt-1相关。
又一个例子:考虑观察每一天是否下雨,那么状态要么是太阳要么是下雨。那么Transition model采用一阶马尔科夫过程,所有的条件概率如图所示:
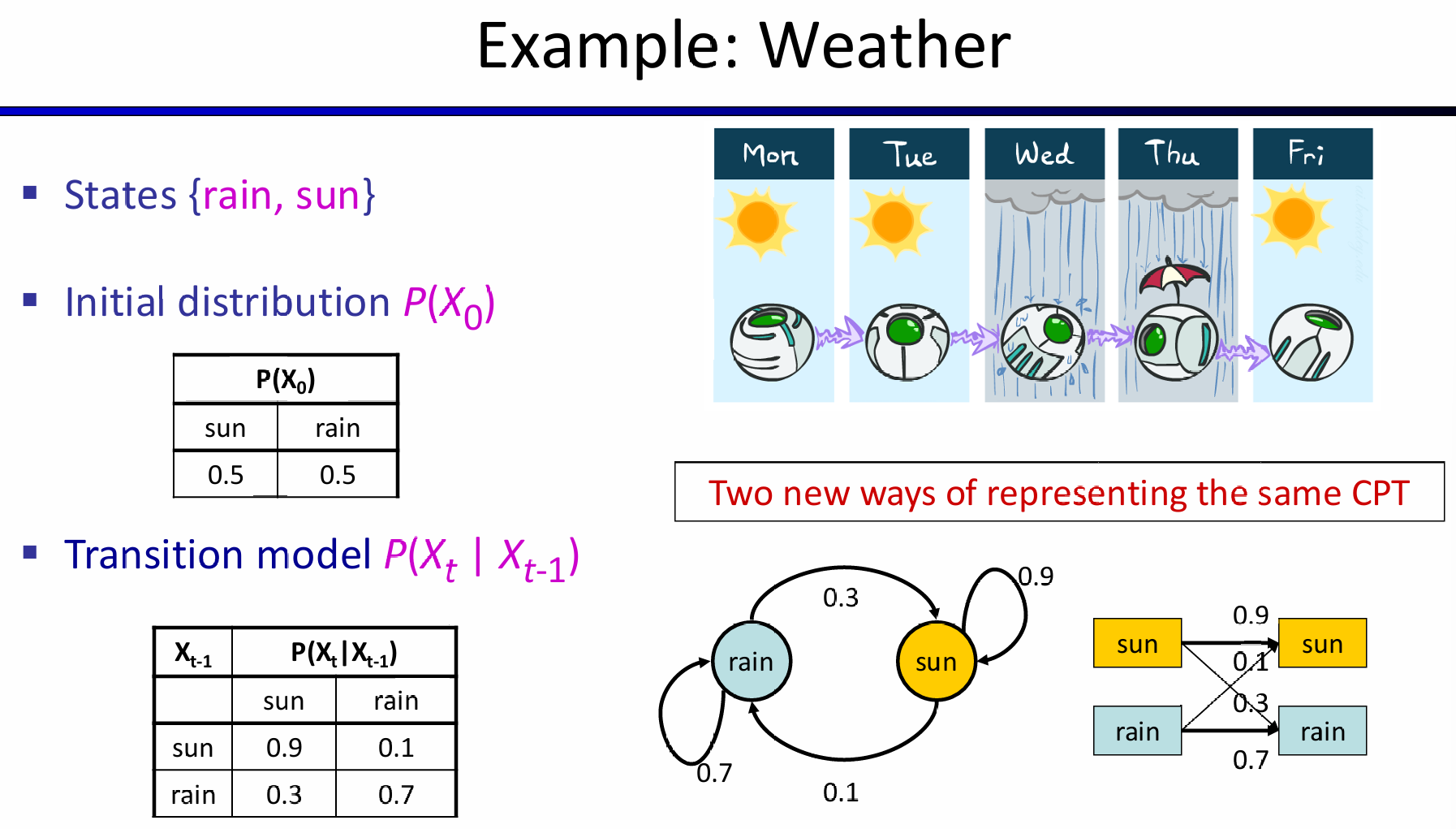
假设初始状态是下不下雨概率都是55开,那么初始状态的\(P(X_0) = <0.5, 0.5>\)。那么第零天的时候,利用transition model以及LOTP就能求出第一天的状态变量的概率分布:
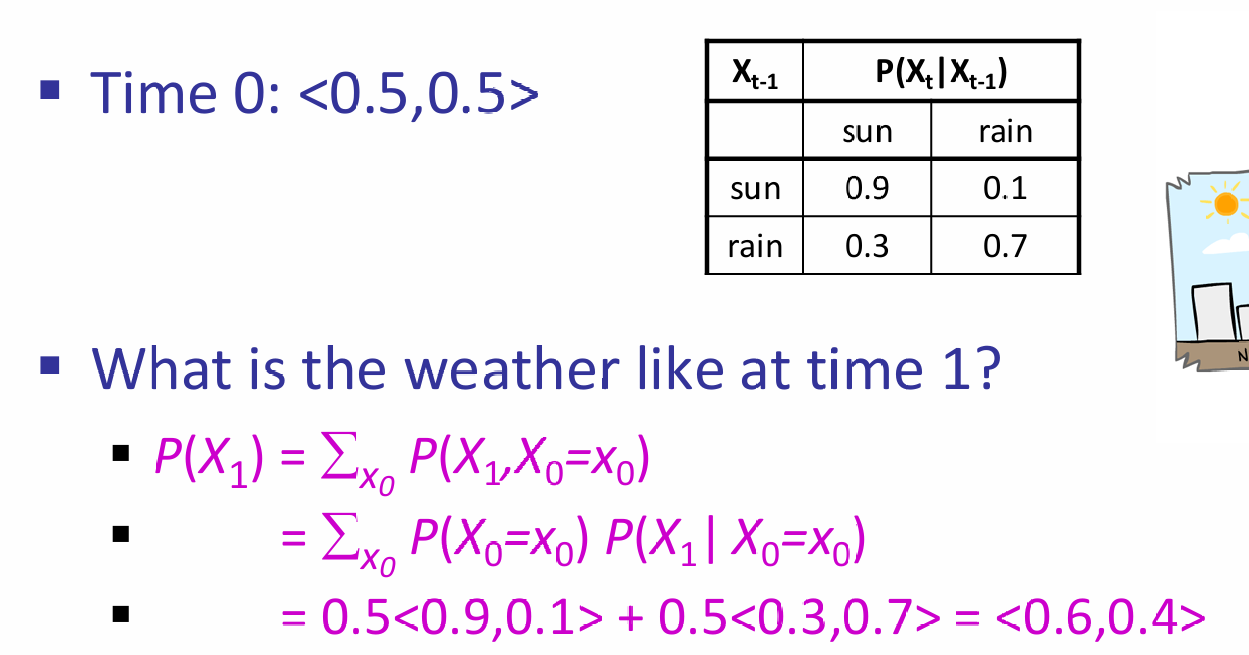
之后几天就是一直在重复这样的计算。可以发现,上述过程中的很多计算其实都是矩阵的乘法。相当于是让当前先前状态的概率向量和\(P(X_t|X_{t-1})\)作矩阵乘。因此,矩阵不断乘下去的结果是:<0.75, 0.25>。
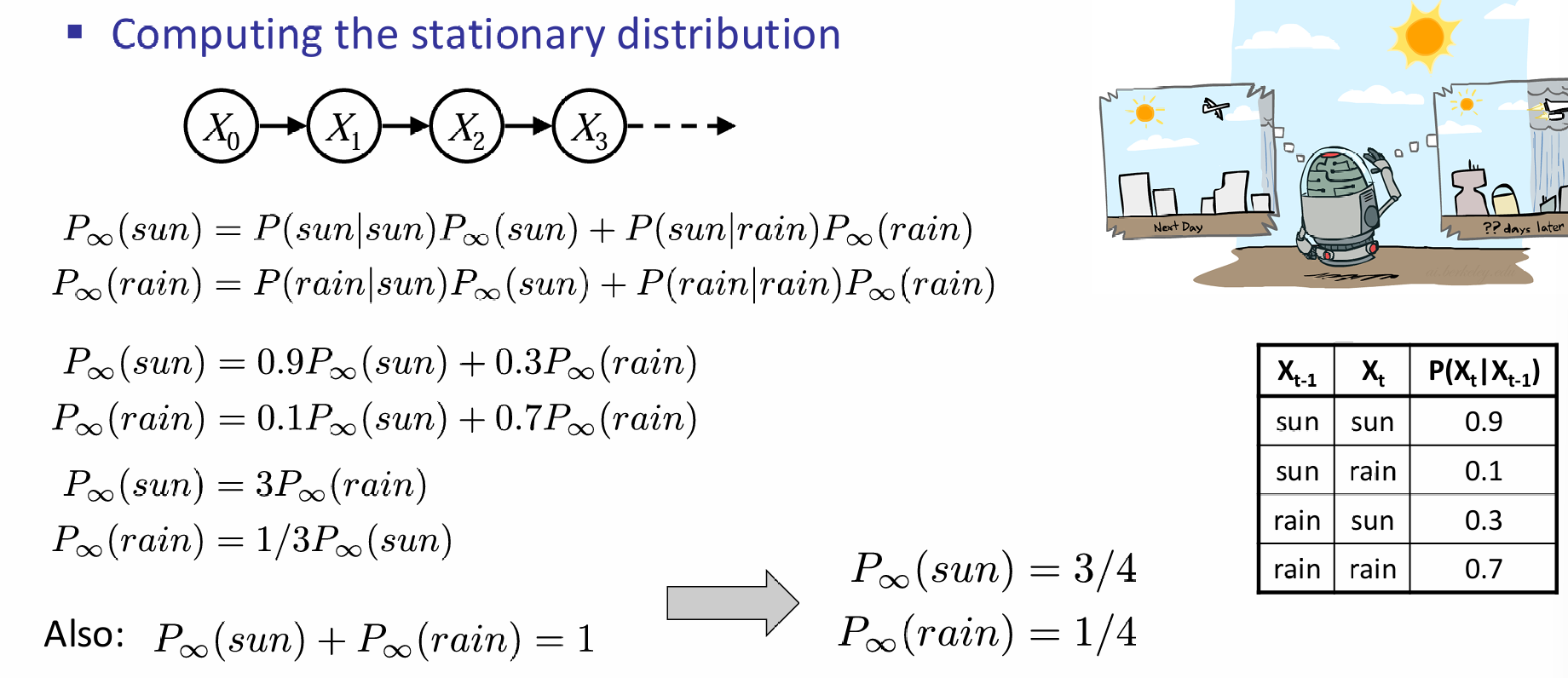
在马尔科夫过程中有这样的结论:最开始的概率分布的影响会随着矩阵乘法不断下降,最终分布独立于最初的分布,达到稳定分布(Stationary Distribution)。最终稳定分布满足: 最终分布可以通过解方程和利用\('\infty + 1 = \infty'\)来求出,如下图:
Hidden Markov Models
有的时候,true state我们观察不到,我们观察到的是Evidence Variables。比如书中的例子:不能直接观察到天气是否下雨,但是能够通过进入屋内的人是否带伞来进行判断。因此可见,除了transition model,还应该有一种sensor model,or emission model,\(P(E_t|X_t)\)来联系observation与unobserved variable之间的关系。
通常来说,初始时间时刻没有evidence variable,那么有如下的联合分布式子: 一个时间点的观察变量会和其他时间的unobserved variable之间有关联吗?这是一个好问题,因此又有一个重要的sensor Markov assumption: 因此\(P(E_t|X_t)\)是sensor model,认定了\(E_t\)是仅和当前时刻的\(X_t\)有关。上述内容是经典的一阶隐马尔科夫过程。之前提到过,有的时候确实建模需要更为高阶的马尔科夫过程,因此总体而言为了提升模型的近似能力,有两种努力的方向:
- 增加马尔科夫过程的阶数
- 增加state variables的数量。例如对于观察是否下雨的模型来说,可以加入season,humidity等state variables
Inference in Temporal Models
对于一个建模好的时序模型来说,有许多种类的inference任务:
- Filtering:计算\(P(X_t|e_{1:t})\)
- Prediction:计算\(P(X_{t+k}|e_{1:t})\)
- Smoothing:计算\(P(X_k|e_{1:t}),k \in [0, t-1]\)
- Most likely explanation:给出\(argmax_{x_{1:t}}P(x_{1:t}|e_{1:t})\)
Filtering的过程可以用recursive estimation:给出\(e_{1:t}\),使用\(e_{t+1}\)预测\(t+1\)时刻的\(X_{i+1}\)。这句话可以利用函数拉来表示: 同时,注意到下式(该式子利用了贝叶斯和sensor Markov假设): 上面的式子中,\(\alpha\)表示归一化,\(\sum_{x_t}P(x_t|e_{1:t})P(X_{t+1}|x_t)\)利用了LOTP来表示给定了\(e_{1:t}\)的情况下,不同\(x_t\)的取值对应的概率以及对应的对\(X_{t+1}\)的条件概率。
利用recursive estimation可以定义forward algorithm:\(f_{1:t+1} = FORWARD(f_{1:t}, e_{t+1})\).而\(f_{1:0} = P(X_0)\)。每一步计算的时间复杂度是\(O(|X|^2)\),\(|X|\)是states数量。这个时间复杂度可能是因为:\(\sum_{x_t}P(x_t|e_{1:t})P(X_{t+1}|x_t)\)中有\(|X|\)个项求和,每一项有\(|X|\)个条件概率更新概率向量。
下图是一个HMM向前算法的演示:
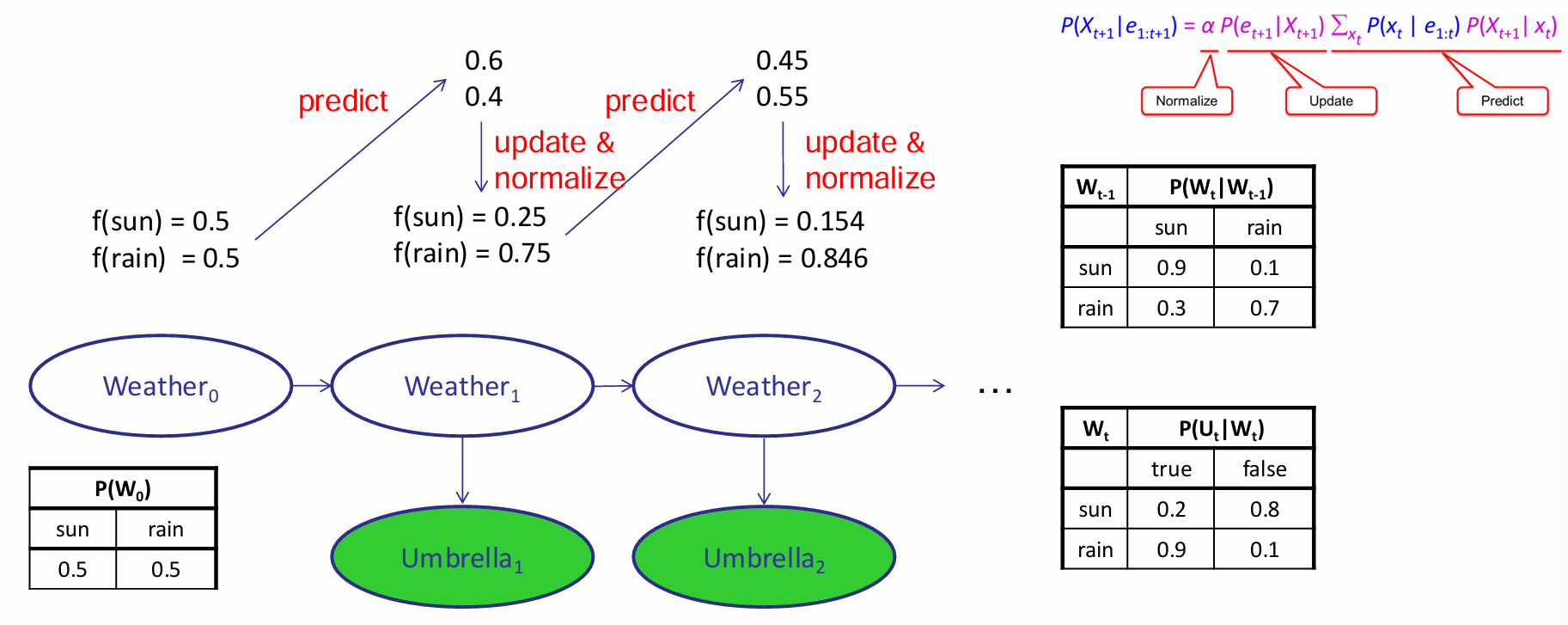
Predict是概率向量和transition matrix transpose矩阵乘的结果,update是根据结果的\(U_t=true\)(for example),挑选sensor matrix对应的那一列,向量间阿达玛积,最后对这个乘积结果向量归一化
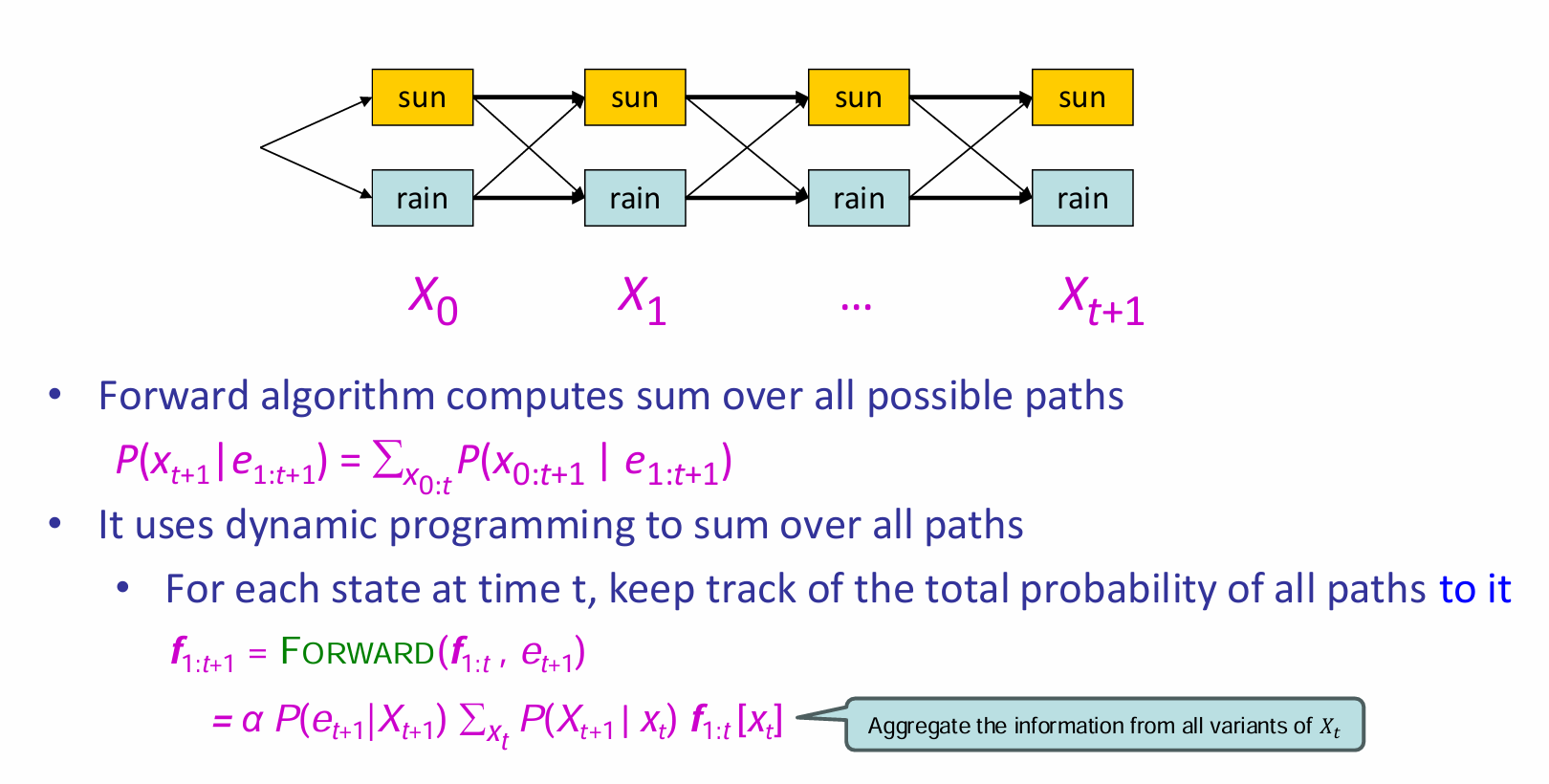
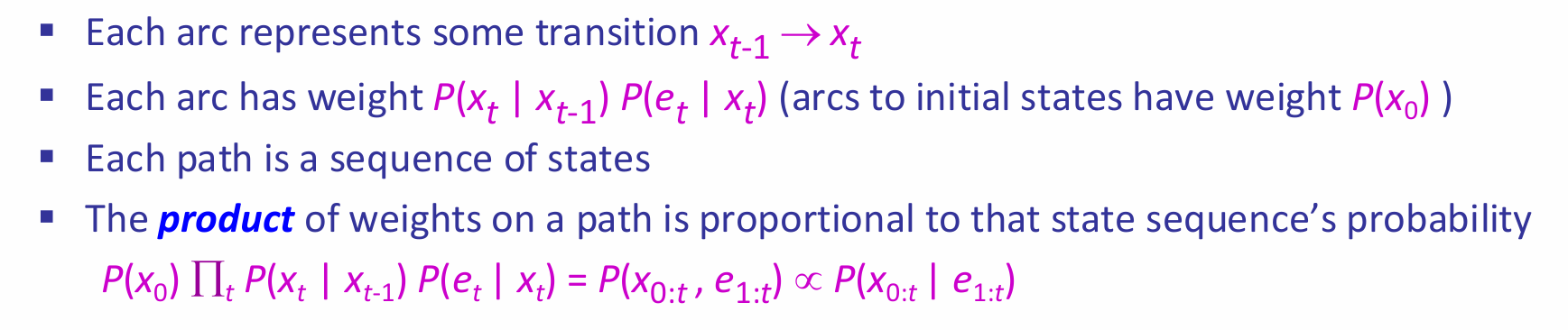
上图给出了一个新的理解算法的视角。图中将evidence and state放在了一起,因此箭头的概率权重如图所示(不仅仅是包含了transition的项,还包含了给出\(e_i\)的项)。因此对于向前传播来说,就是求出到达\(X_{t+1}\)这一层两个节点的所有路径的权重的和,两个值归一化后就能组成概率向量。而这个算法的实现是通过recursion实现的,称为Forward Algorithm。
有了这样的新理解,就好方便理解Most Likely Explanation的算法了:本质就是寻找使得权重最大的路径,其中每一层的节点可以自由选择。在向前算法中,对于每一个时间点t,都记录下权重(unnormalized)最大的路径。显然,这个算法也是recursive的,称为Viterbi Algorithm。

Viterbi Algorithm 推导:
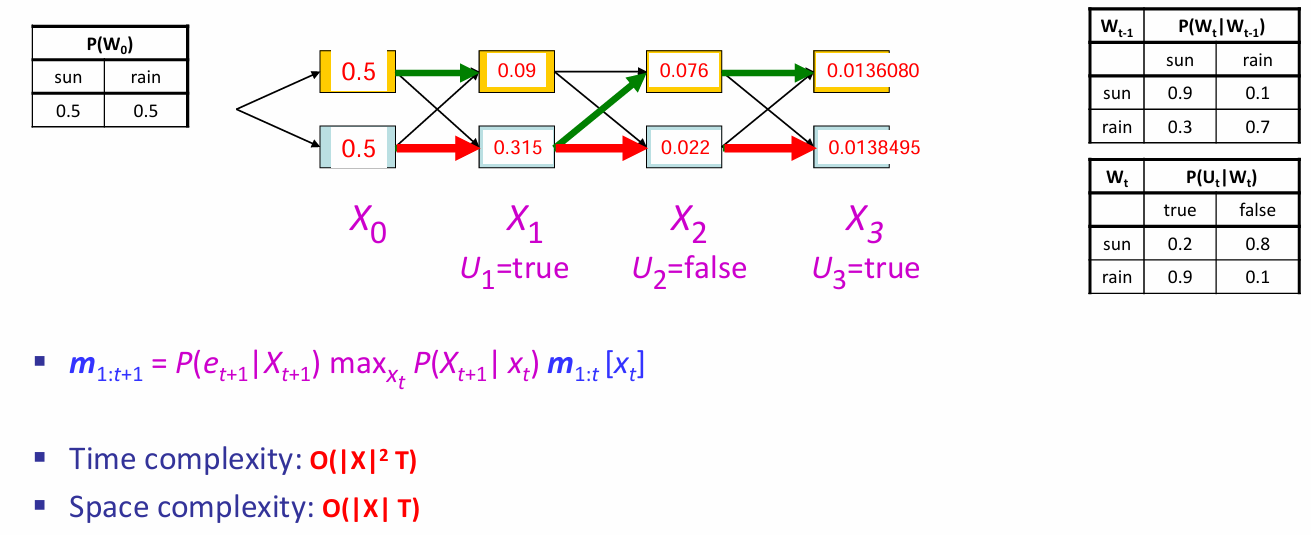
对于每一个\(X_t\)的两个状态,都各自有一条最大的likelihood路径;The optimal sequence is identified by following these arrows backwards from the best final state
Dynamic Bayesian Network (DBN)
Construction
如果想要让贝叶斯网络能够加入时间信息,那么idea非常的straight-forward:直接复制贝叶斯网络,然后将不同time slice之间的unobservable variable连接起来就可以了。如下图所示:
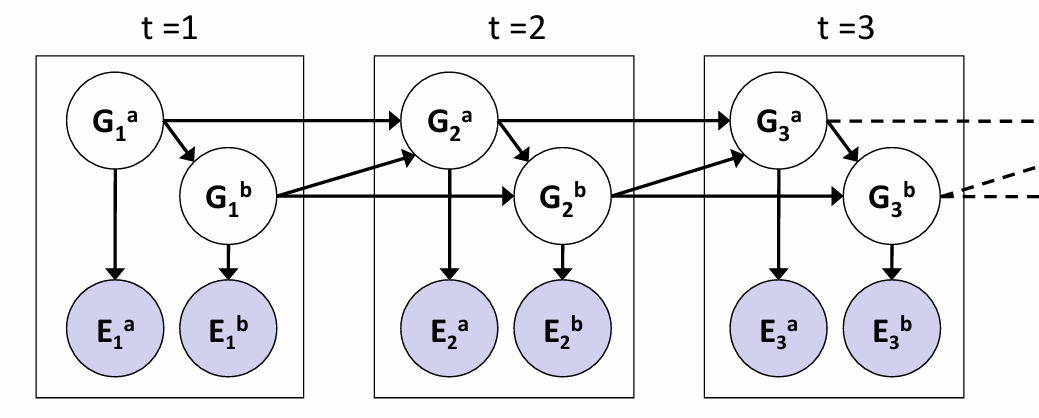
显然,every hidden Markov Model can be represented as a DBN with single state variable and a single evidence variable;同时离散DBN也可以用HMM表示。如果说在DBN中的一个time slice中有n个state variable,则转化为HMM中的state variable就等效于有\(2^n\)种可能事件的变量,那么可想而知的是transition model的matrix parameters将会超级的多。因此DBN的最大优势就是:充分利用sparseness,CPT们的参数量远远小于HMM中的transition model matrix。一个关于参数量大小的例子如下:

Exact Inference
那么想要在DBN中inference,其实就是在BN中inference,而inference的公式已经给出过。给出了不同时间段下的观察,那么只需要复制多次一个BN直至能够容纳所有的观测就可以,这种技巧称为unrolling。那么既然展开后的DBN也是BN,那么也应该可以使用variable elimination,但是可惜的是由于整体网络将会非常大,因此factor的形状将会很大,因此并不高效;因此合理的是:算法过程中最多出现两个slice,从slice 0开始,那么加入slice1,就会把slice 0 sum out掉,然后加入slice 2,然后会把slice 1 sum out掉。这和forward algorithm非常的类似。
Approximate Inference
当state space非常大的时候,那么exact inference也是十分困难的,如何近似inference?在BN中介绍过likelihood weighting等sampling方式,但是在此处中,随着时间的推移,后续的权重会掉的非常快,低权重的样本会对最终的估计结果产生较少的贡献;而很多情况下,inference所用的观测都是一些下游段观察到的数据,i.e.,后续时间段所得到的观察。
因此引入了Particle Filtering:用一系列的样本(samples/particles)来代表每一步的belief state。从最开始的\(P(X_0)\)开始,按照这个分布随机采样\(N\)次,所有的particles都有权重1。然后所有的样本都按照transition model中给出的分布进行移动,并拥有类似于likelihood weighting中的权重: 这种操作captures the passage of time:因为关键是不同时间下的\(x_t\)其实都是在一个domain上的,只不过是不同时间下,domain中的分布不同。因此初始化一个个样本,然后按照分布随机模拟domain中状态的转移。同时那些更能契合evidence的样本所拥有的权重更高。在此基础之上,如果不断重复这一步骤,那么这个算法就是likelihood算法了,而问题就在于\(w=P(e_t|x_t)\)权重会快速下落。
因此particle filtering采用的是重采样:样本按照权重重新被采样,并且赋予相同的权重1。因此t步之后,拟合的状态概率应该是: 关于重采样操作,课本原话是:The population is resampled to generate a new population of N samples. Each new sample is selected from the current population; the probability that a particle sample is selected is proportional to its weight. The new samples are unweighted.