Adversial Search
minimax
游戏有很多种,这里主要讨论的是零和游戏。如果是一个单玩家的游戏,那么single-agent tree很容易画出来。但是如果有另一个玩家进行对抗呢?
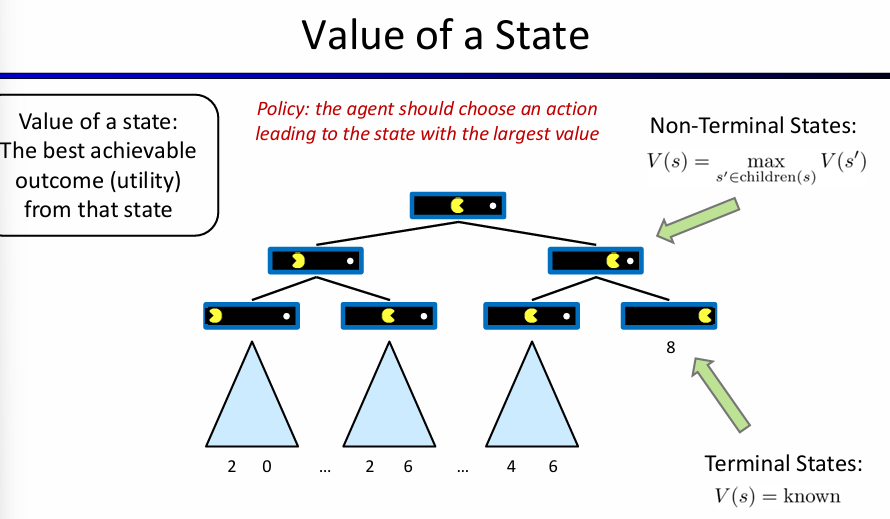
可以先通过single-agent tree来介绍一些概念:非叶子节点是non-terminal states,其value是所有孩子节点的最大的value;而叶子结点是terminal states,其value是已知而确定的。因此agent的policy应该是:choose an action leading to the state with the largest value。
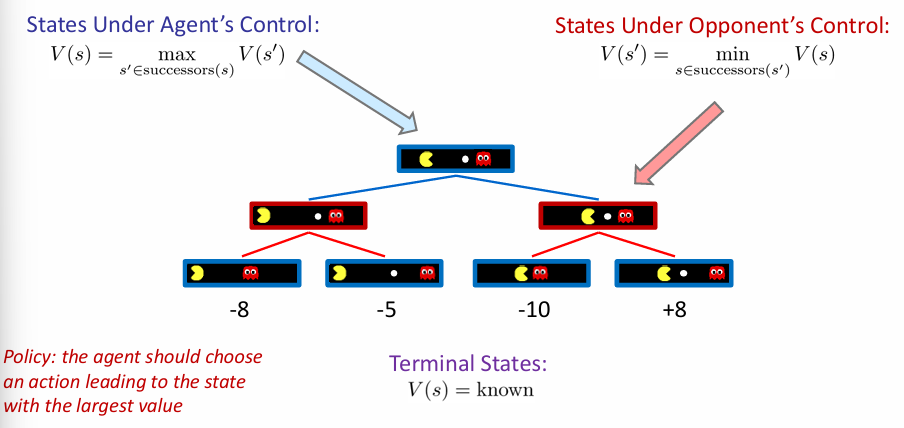
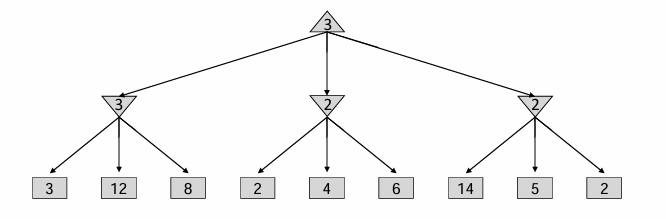
但是如果为下图:现在有两个玩家,轮流执行操作。那么在agent操作回合的节点的value,就是该状态的successors states的value max;而在对手操作回合的节点的value,也是successors states max value for opponent,但是因为是零和博弈,所以也就是尽可能使得agent value最小,因此state value就是successors value min!
因此agent的执行策略应该选择一组操作,前往有着最大value的状态。因此这个问有一个形象的名字:Minimax。
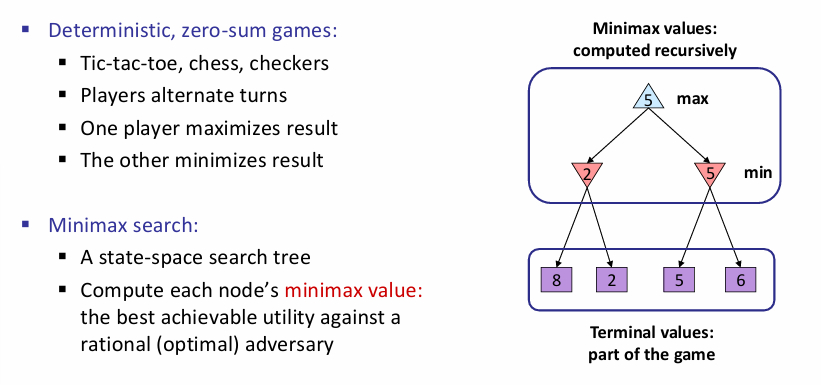
对于这类对抗搜索的minimax问题:常见的有tic-tac-toe,下棋等经典问题,其特征是玩家轮流执行回合,一个玩家达到最大值,那么另一个就会达到最小值。minimax search tree中,一层max一层min。
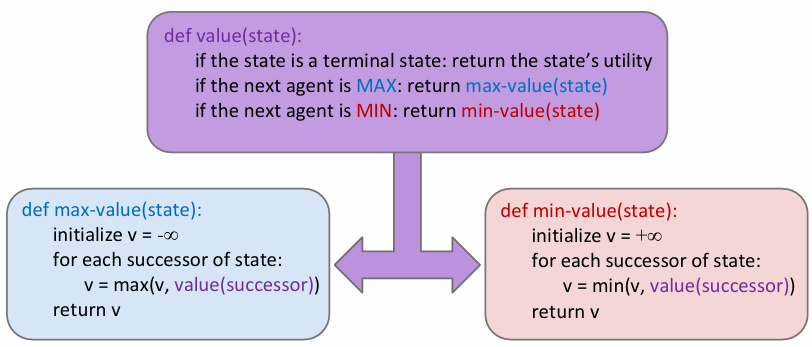
minimax具体实现如下:可见对于一个状态点来说,如果接下来是max agent,那么会选出节点所有孩子的value的max,反之则会是min,所以下面的示意图中:第一行是min agent的可能状态,第二行是max的可能状态,第三行是min agent操作之后的可能状态。min agent总是会选择可能状态中value最小的。注意,这里的value全部都是对于Max-agent而言的!因为零和中:agent min = opponent max。
这种算法很像DFS,时间复杂度是\(O(b^m)\),空间复杂度是\(O(bm)\),其中b为branching factor,m为平均双方共执行的步数。这种复杂度是惊人的,例如在国际象棋中,b m约为35和100,那么exact solution is completely infeasible。那么应该如何搜索整个树呢?
一种解决方式就是:在探索一个节点的value时候,往下深度探索state successors value时,限制深度。但是这样就有问题了:假如说最大深度搜索到的全都是non-terminal state呢?何来的value?那么就可以考虑''启发式函数''来评估non-terminal state的value,aka,Evaluation Functions。这就是最核心的内容。
In this way, the guarantee of optimal play is gone.
在以前,这个函数是人为定义的,例如象棋游戏中,函数输入是当前状态的棋盘,那么value就和棋盘上面棋子有关,例如我又王后就是加分项,对方没王后就是减分项,诸如此类。
最近的研究中,尝试了其他的启发式函数。如蒙特卡洛采样法,在一个状态是会随机采取行动,直到游戏结束,并且重复这个操作很多次,然后根据多次模拟的结果给出value。
Pruning and Alpha-Beta
Branching Factor是一个非常重要的参数,象棋中的branching factor相比之下还不是特别大的,但是围棋的branching factor巨大无比,高达361。可不可以限制它呢?Idea: limit the branching factor by considering only good moves. 比如说pruning。
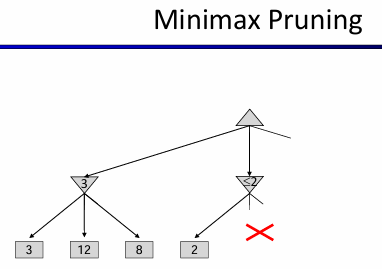
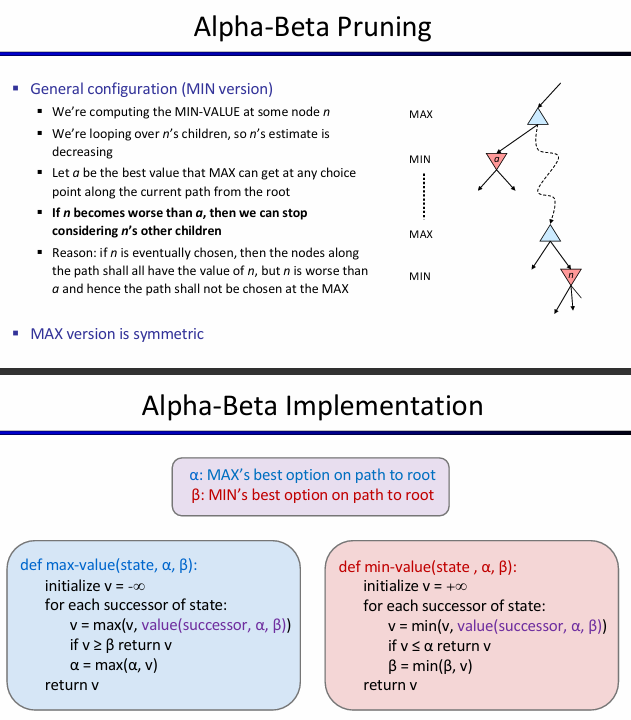
对于上面这个例子来说。第一行是max agent操作,而第二行是Min操作。左边看出,第二行左节点为3,那么考虑中间这个状态的时候,发现到了一个2小于3!这意味着:如果max agent考虑了这个节点,那么min agent反手一个2,那么就不如3了!因此其实这个节点的考虑在遇到2<3的时候就已经结束了! 总结一下:这种alpha-beta pruning过程如下:
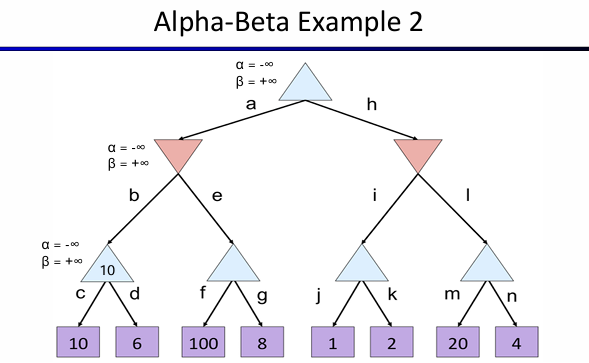
下面的这个例子中,首先从左边开始考虑。第三行的左边是10,然后看右边那个,看到100的时候,8就不用看了,因为这意味着第二行的左边一定选择的是10,因为第三行的第二个至少是100,所以g被剪掉;对于第二行右边的节点,其左孩子是2,那么此时整个I分支就不用看了,因为第二行右节点最大是2,而第二行左边是10,因此第一行一定是10,因此I被剪掉。
运用了alpha-beta pruning有一些性质:首先是孩子的顺序将会影响pruning的效率,这一点在上面的这个例子可以看出来!其次就是如果是perfect ordering,那么时间复杂度将会降到\(O(b^{m/2})\),意味着可以将探索的深度翻一倍!
Expectimax
在minimax的算法中,一个关键的假设是:你的对手是理性而且聪明的。但是现实中并不完全如此,有的时候对手并不会总是采取最优解。换而言之,这就是worst-case vs. average case。如果我们假设:对手采取行动的方式是随机的,也就是对手的每一种合法行动的可能性都是一样的。因此对于原先的min层来说,相当于是变成了取所有可能value的平均值。Expectimax Search就是这个道理:
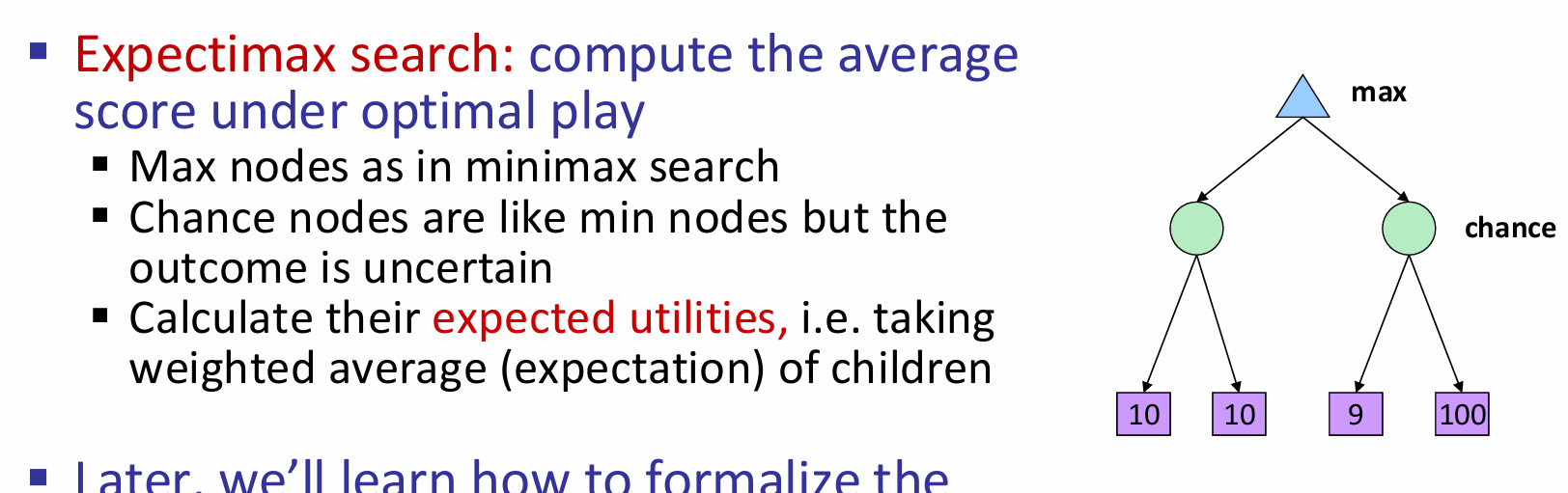
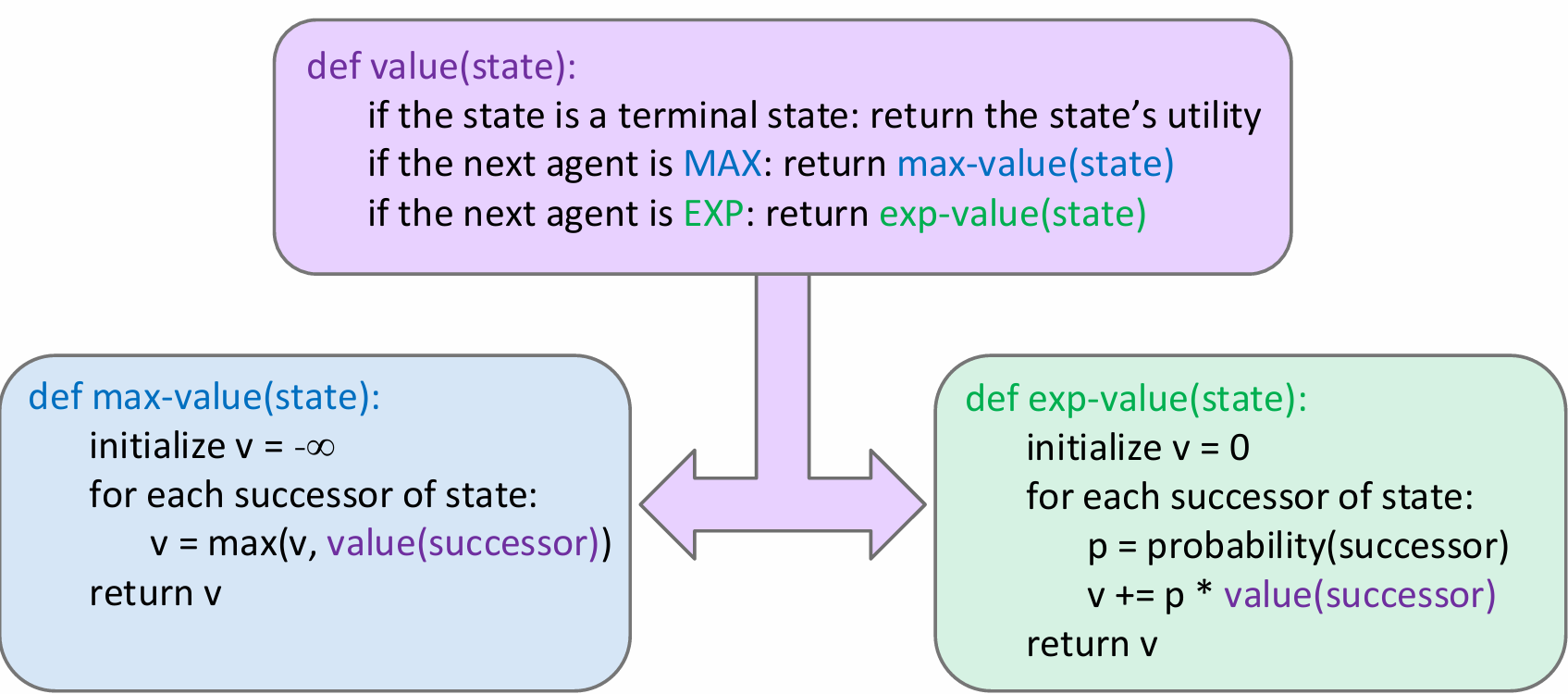
可见,其实expectimax和minimax算法的差别并不是很大;另外一个问题:expectimax有pruning吗?没有!因为必须要遍历机会节点的所有子节点。与minimax中求最大值或最小值时不同,每个值都会影响expectimax计算的期望值。
不过,当我们已知节点有限的取值范围时,剪枝也是有可能的。
Mixed Layer Type
虽然minimax和expectimax分别使用了最大值/最小值节点和最大值/机会节点,仍然有许多游戏不适用于这两种算法中的模式。即使是在吃豆人中,在吃豆人移动后,通常会有多个而不是一个幽灵进行轮流移动。这可以理解为我们必须在游戏树中不定地加入新的层。在一局有四个幽灵的吃豆人游戏中,就需要在两个吃豆人(最大值)层之间连续插入四个幽灵(最小值)层。其实,这么做肯定会加强所有最小值节点之间的合作,因为它们会轮流地进一步让最大值节点能得到的分数最小化。如果有一局有两个幽灵的吃豆人游戏,其中一个幽灵采取最优行动而另一个采取随机行动,我们可以用交替的最大值-机会-最小值节点层来表示。
Reference: https://zhuanlan.zhihu.com/p/148256240
General Games
并非所有游戏都是零和的。其实,在一些并不含有直接对抗的游戏中,不同的agent可能有各自独立的任务。这样的游戏可以用具有多agent效益(multi-agent utilities)的树来表示。每个agent会倾向于在各自控制的节点处让自己的效益最大化,而不考虑其他玩家的得分。看看下面这棵树:
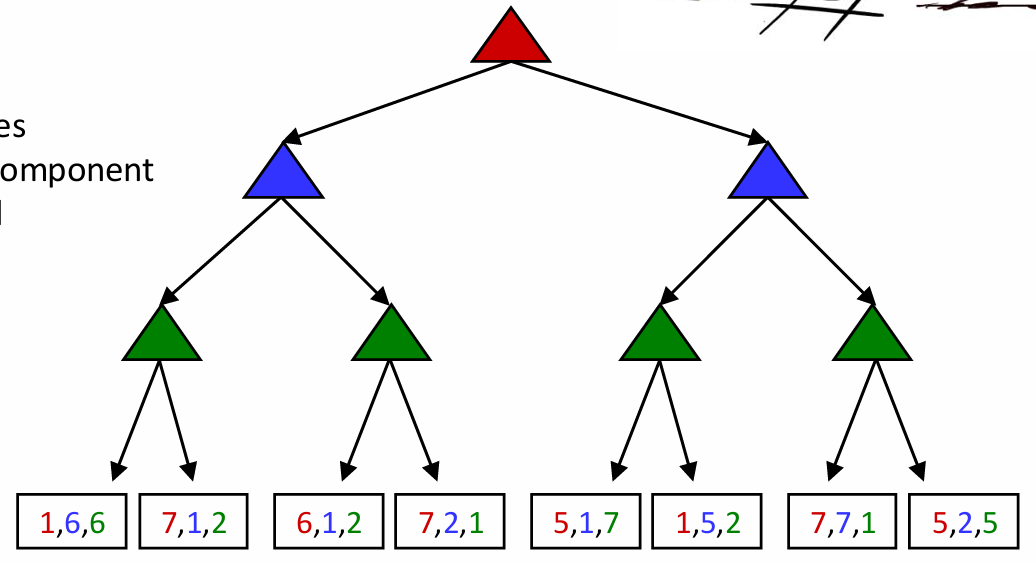
红色、绿色和蓝色的节点对应三个agent,分别在他们各自的层中取相应颜色的最大值。这棵树最终根节点的结果效益为三元组(5,2,5)。具有多agent效益的普通游戏是通过计算提升行为的基础例子,因为在根节点处的效益会倾向于让所有参与的agent共同合作来得到合理的效益。
Reference: https://zhuanlan.zhihu.com/p/148256240