Actor-Critic Algorithms
Recap
Actor-Critic基于Policy Gradient,因此在此回顾策略梯度的方法。
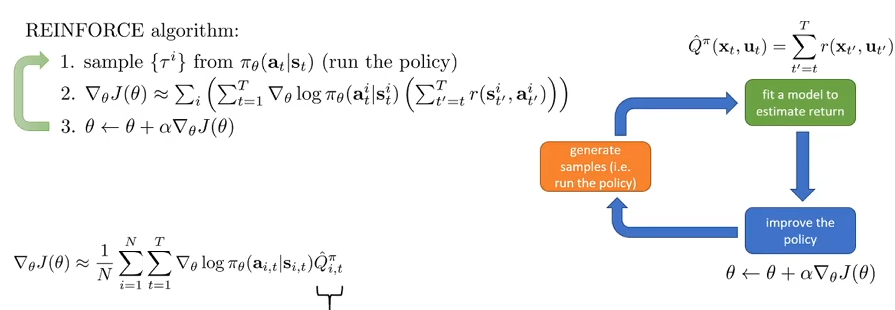
上述图片高度概括了policy gradient的核心步骤:首先是基于当前的参数进行trajectories的采样,它对应橙色部分生成样本;然后根据采集到的数据计算reward to go,然后各自乘上对应的概率的对数,其中计算reward to go对应的就是绿色部分的fit the model;最后执行参数的更新,根据优化的思想,利用之前计算出来的目标函数的倒数式子的结果来进行更新。
原来的reward to go实际上应该代表的是之后的时间步的reward的期望: 但是现在用了样本来近似上面左边的式子,很明显,一个样本用来近似这种方式的方差太大了。我们其实很想要得到的是该时间步的Q-value: $$ % 第一部分:Q函数定义
Q(s_t, a_t) = \mathbb{E}{\tau \sim \pi} \left[ \sum{t'=t}^{\infty} r(s_{t'}, a_t) \mid s_t, a_t \right] \quad \text{(true expected reward-to-go)}
\ % 第二部分:策略梯度近似
\nabla_\theta J(\theta) \approx \mathbb{E}{\tau \sim \pi\theta} \left[ \sum_t \nabla_\theta \log \pi_\theta(a_{i,t} \mid s_{i,t}) Q(s_{i,t}, a_{i,t}) \right] A^\pi(s_t, a_t) = Q^\pi(s_t, a_t) - V^\pi(s_t) \quad \text{(how much better \(a_t\) is)} $$ 所以advantage function越精确,方差越低。
What to fit
在上述的介绍中,关于fit the model中fit的指标,涉及到了三种:Q V A。那么fit什么指标更好呢?Q-value可以写成当前这一步的reward加上下一步的state的分布下的State value function的期望。这里,我们考虑让样本来近似这个期望。因此我们可以重新近似地写一些式子了: 所以let's just fit \(V^\pi(s)\)!虽然这不是actor-critic算法的唯一选项,但是之后的展开都讲采用这个去fit。常见的估计\(V^\pi(s)\)的方式是用神经网络,输入的是state的参数化表示,输出的是value值,我们称这个神经网络含有的参数为\(\phi\)。
现在考虑的目标函数是:
Function Approximation
对于一个特定的policy下的一个状态的state value,我们可以用轨迹在这个状态点之后的所有的reward的和来进行近似。我们希望有多条轨迹能够经过这个state,从而提供多个reward的总和,其取平均能够给出一个更好的state value的近似,但是实际中是并不可行的,因为reset到那个状态然后继续展开实验不是很方便。
但是有了神经网络的帮助,假设有两个十分相似的state,那么在输出对应的state value的时候,两个state的结果或者是ground truth会互相渗透,那么就知道了在两个相似的状态,给出的value应该是相近的。这是神经网络用于拟合state function的合理性的直观理解。最重要的是,这样克服了无法rewind的劣势,因为根本无需rewind。那么为了训练这个神经网络,采用的训练集和损失函数如下: 这种方式同样能够减少方差,因为相似的state可以认为是对应的value,在训练期间会互相渗透(leak),从而实际上是可以更好的具有泛化能力,避免了用单样本来进行近似的情况。
那么在fit的时候,对于一个时间步的state and action,我们要\(Q^{\pi}(s_t, a_t) \approx r(s_t, a_t) + V^\pi(s_{t+1})\),那么其实可以在训练的时候就把当前步骤的reward加上:
From Evaluation to Actor Critic
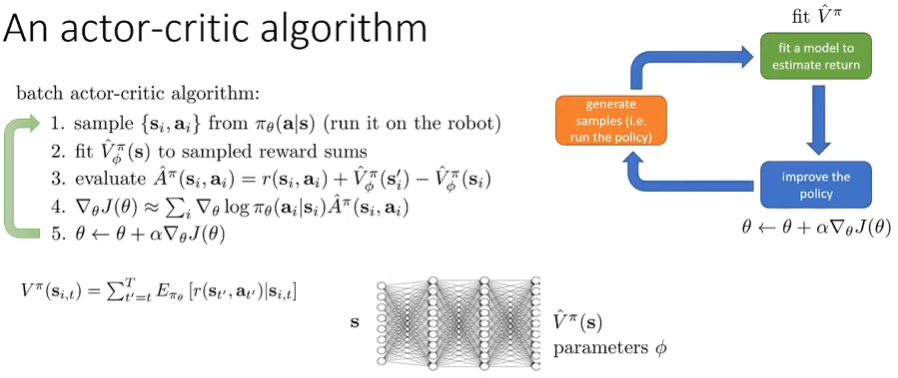
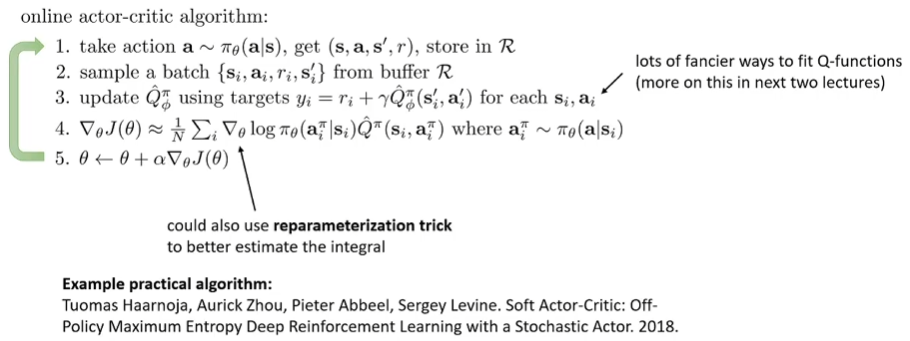
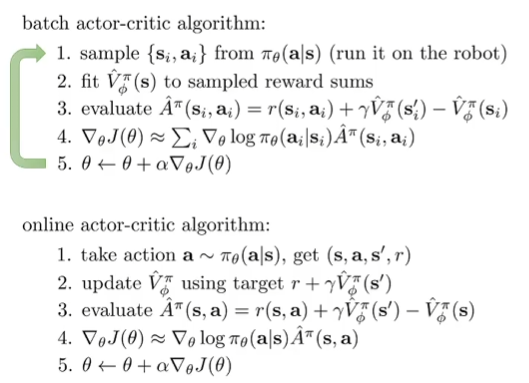
一个actor-critic算法如上:不同的是fit的model是state value function。fit的方式可以是神经网络的推理,也可以是单样本作为近似吗,后者也被称为Monte Carlo法。
但是有一个问题:如果T是无穷呢?state value function在绝大部分的情况下会无穷大。simple trick:better to get rewards sooner than later。在这里我们引入折扣因子(discount factor): 这里的\(\gamma\)在0-1之间,通常来说0.99很好。从MDP的角度理解这个因子,那就是在state转换的时候,有一定的概率转换到terminal state。
引入了之后,对应的model fit有什么改变吗?对于训练神经网络来说,无非就是label要进行略微的修改: 对于目标函数梯度的改写: 最后完整给出引入了折扣因子的actor-critic算法:
Architecture Design
之前用神经网络表示了state value function,但是关于\(\theta\)是如何输出当下state的action distribution是没有讨论的。这经常也是用神经网络表示的。
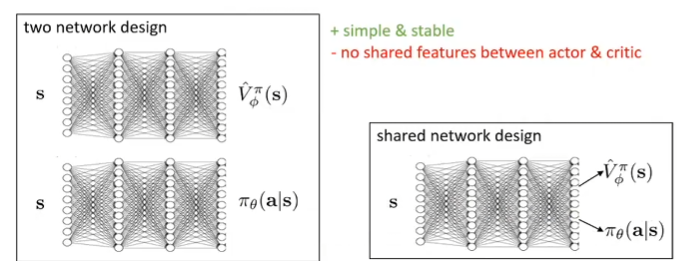
左边将两个神经网络单独表示出来,这样训练简单而稳定,但是不认为高效,因为很明显state的高维特征空间对于state value and action decision making来说都是有用的。因此有右边这种变体,前面shared部分被认为是对state的高维特征的学习,而两个任务头输出对应的内容。
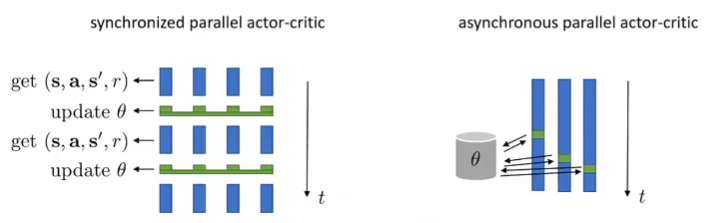
在online的算法中,拿出一个样本,然后就更新参数,假如说是并行计算的,那么就需要设置检查点来确保所有的采样和fit都完成了,然后才一起更新一次。但是可以异步,尽管两个线程更新的时候,生成样本的参数可能是不一样的,但是因为参数更新差异不大,上述的影响可以忽略,并且发现异步带来的效率提升非常的大。